

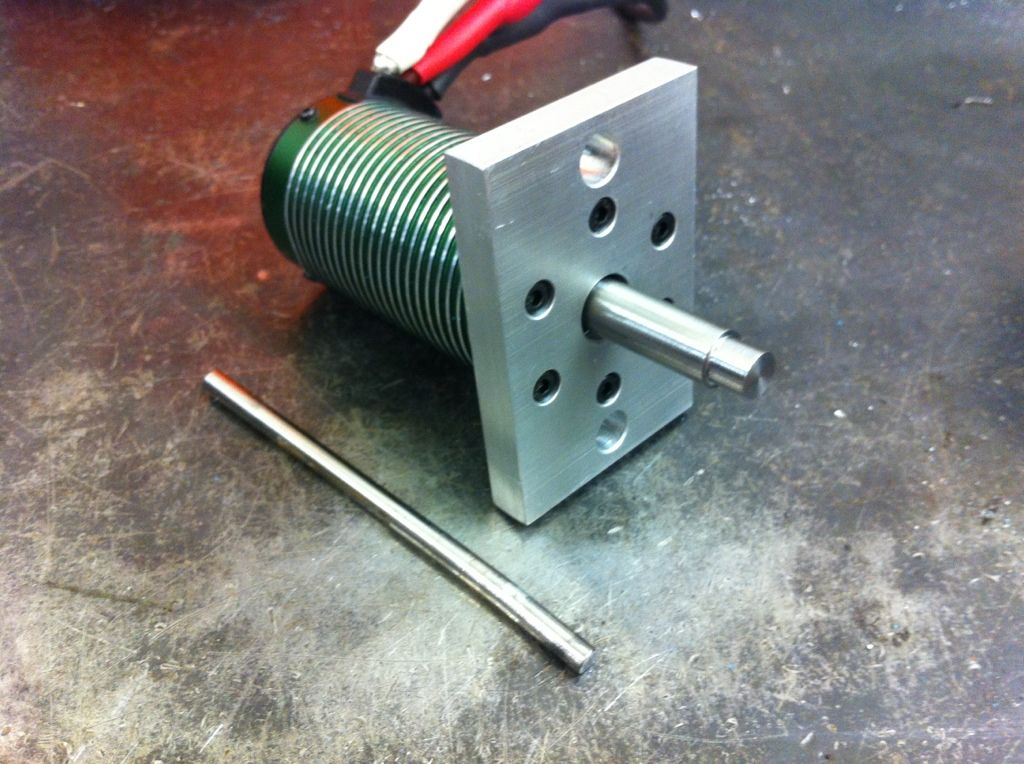
Designed a new front plate for the motor which keys into the motor can and acts as a mounting also, its held on with 6 bolts now as aposed to 3, ive also knocked out the shaft and made a larger diamater one which ill finnish of soon...
The front plate also has holes for the new M8 as aposed to the original M5 mounting holes, so i can tighten it right up;
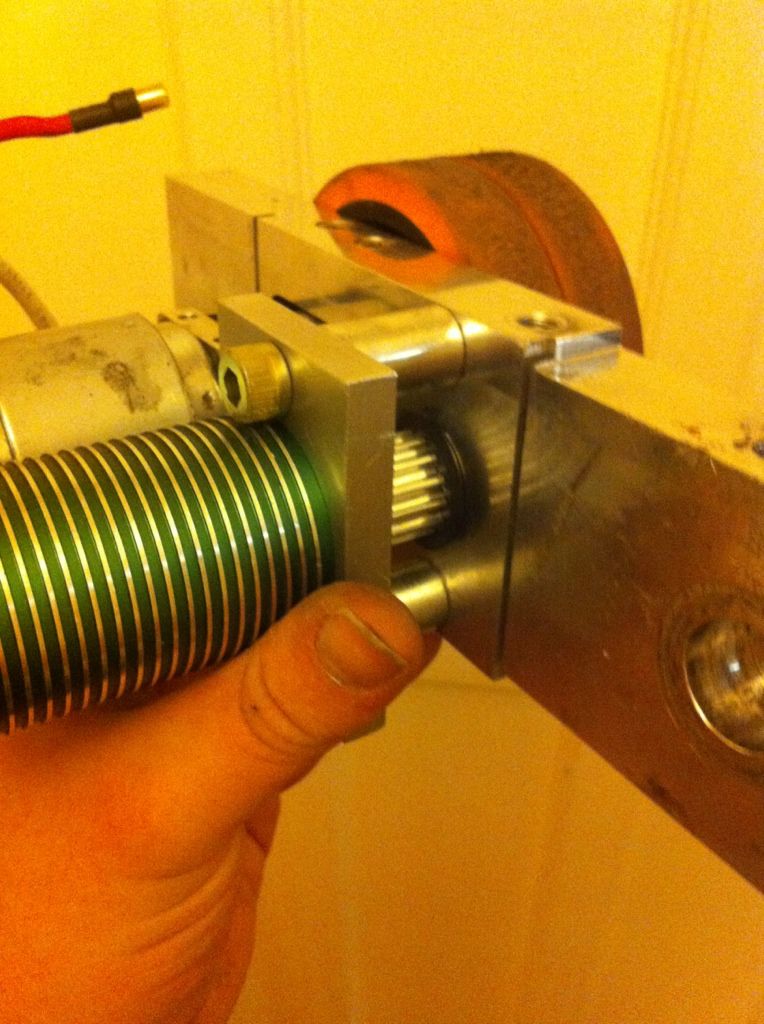
next step is to put a keyway on it, and assemble it fully- theres no rotor internally in this picture... then ill be putting a support bearing in the bulkhead of 720 and mounting a new pulley to the shaft... i cant see this new assembly falling apart.
Old shaft next to it for referance... Thanks to Dennis for machining the aluminium.
- FRA
- Forum
- Robots
- Events
- Media
- What's New?
All times are GMT. The time now is 03:54.

 Reply With Quote
Reply With Quote


Bookmarks