




Rather than start a new thread, i'll just put Daiske II's stuff on here too:
Fitted new wheels today to allow it to run inverted, had to change a lot of the way they were setup and the bulkheads had to be cut again or altered but got there in the end. The robot was quick with the 75mm wheels and could lift the front off the ground when accelerating or spinning around so it will probably be even quicker now.
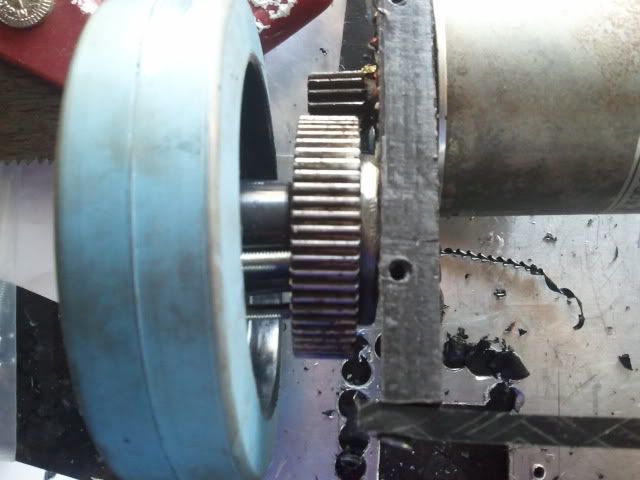
Got some photos of various parts. The last ones shows a small problem I had with the screws that hold the gears onto the shaft catching on the gear attached to the wheels on one side it was stopping the wheel turning completely, so i've put a spaced I had lying around in the garage to give it a bit more clearance. It came off of the 2 wheelchair motors I bought from Jonny a few months back, so at least those ridiculously big shafts (steady now) that it took me ages to get off of them have proved useful in some way
One 75mm and one 125mm wheel:
Both wheels changed:
The wheelchair motor spacer:
- FRA
- Forum
- Robots
- Events
- Media
- What's New?
All times are GMT. The time now is 08:41.



 Reply With Quote
Reply With Quote
Bookmarks