

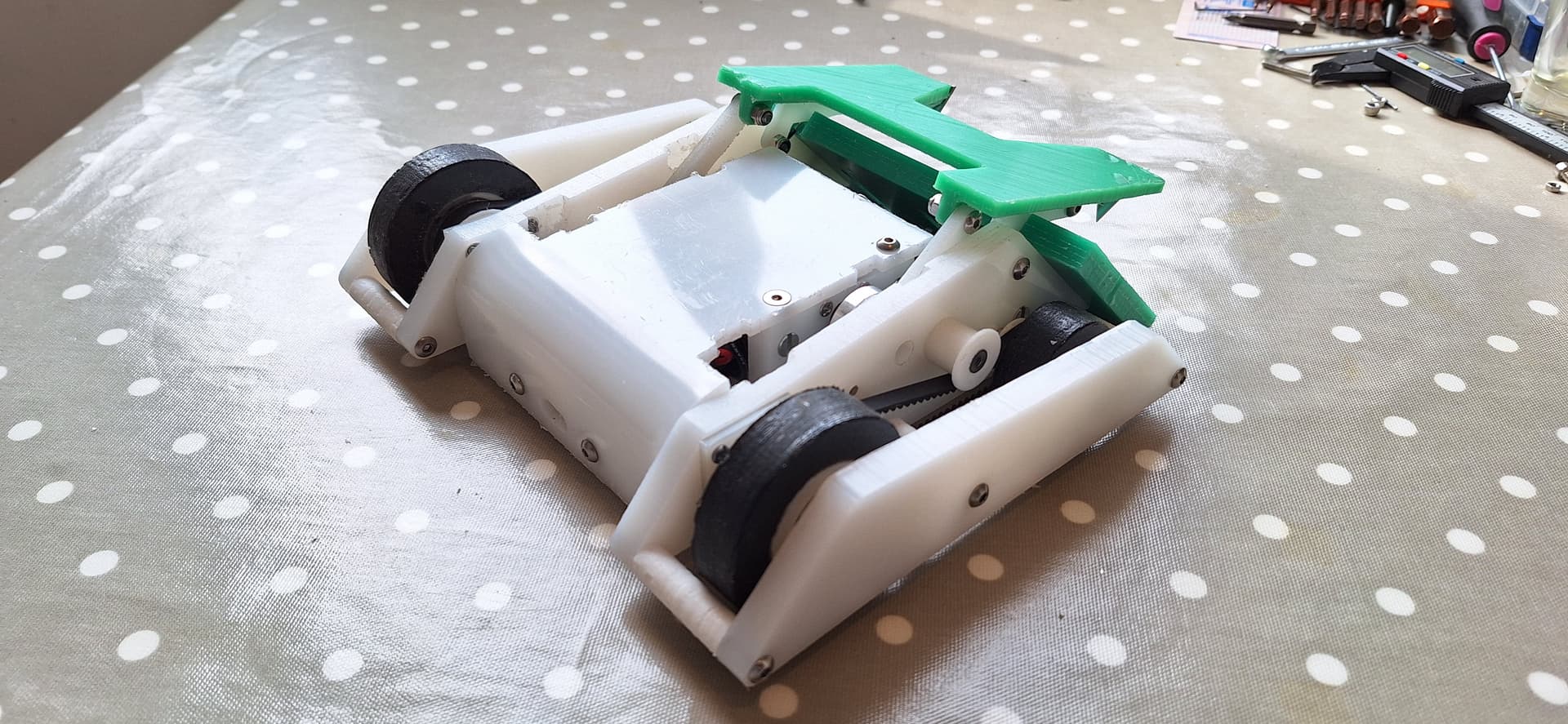
This is Schnake, a four-bar grabber built for my Dad for the Robot Rebellion event at Rapture in July 2022. This is my fourth BW, my third four-bar build, my second robot to use CNCed parts, and the first bot built entirely for someone else to drive! This was a fast build compared to many of my other projects, so I'll just tear right into the design stage.
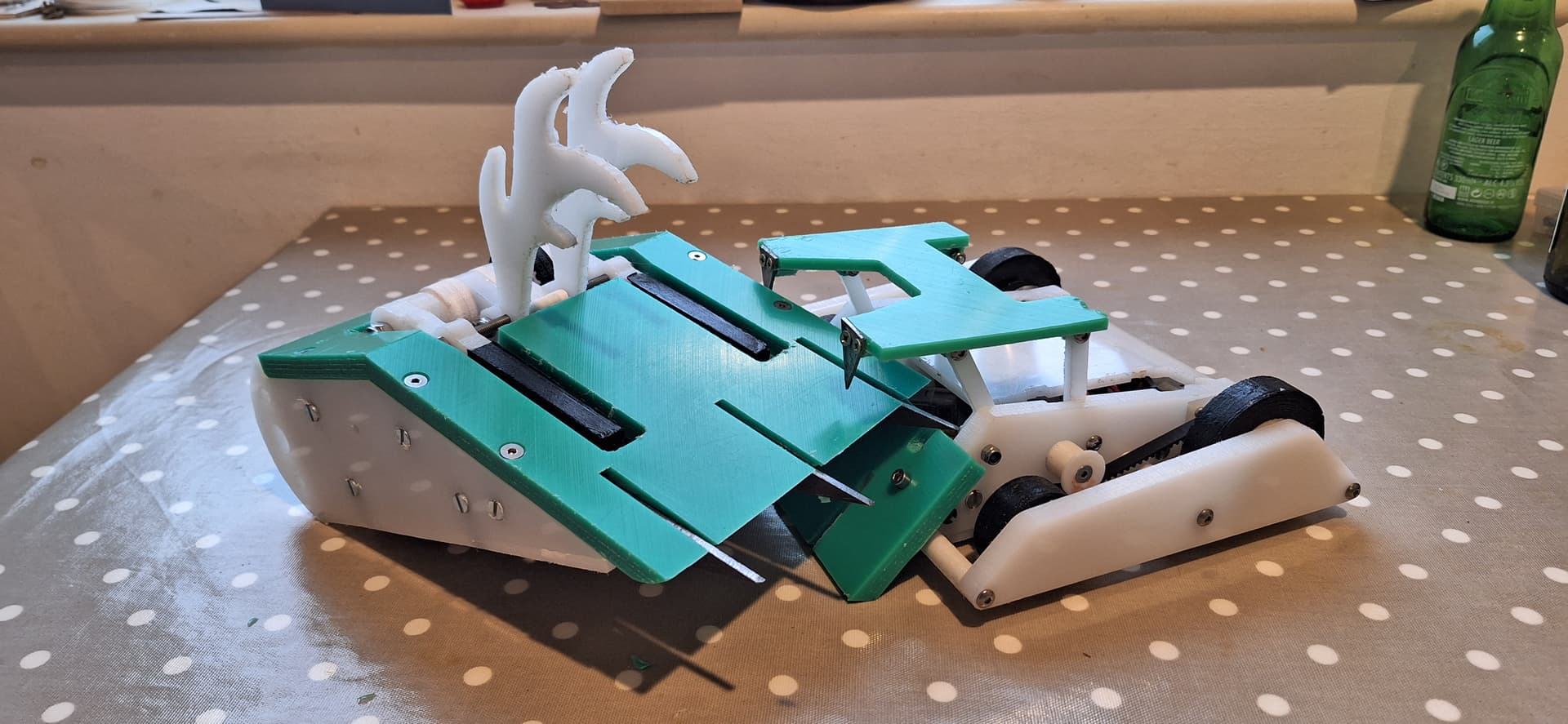
I had tossed around the idea of making a four-bar lifter before (this was originally going to be for a potential Léim 3), but since my Dad wanted to do something different for his design I was interested to see if I could do something different. The idea for the four-bar grabber mechanism came from seeing some machines use their lifters in reverse to try and hold onto opponents. I saw a potential good idea in having a weapon capable of grabbing opponents, but also capable of being recessed into the robot. After experimenting with geometry for a while to see if the idea was viable, Schnake was born. The name of the robot comes from several places, even if it's been more of an afterthought than previous builds. The motion of the grabber closely mimics that of a snake, as do the teeth. Schnake is also a very Irish way of saying snake, and inspiration was taken from the accent of a famous Irish comedian, Francis "The Viper" Higgins (NOTE: Not pronounced like "Schnack").
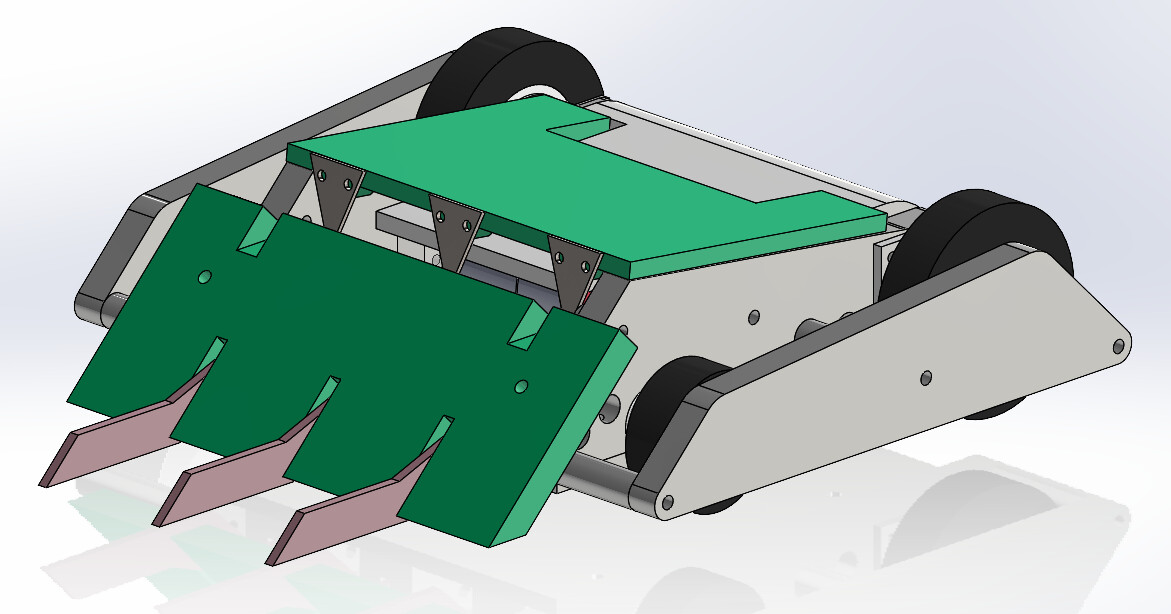
The mostly finished CAD for Schnake. The robot uses most of the same internals as Babróg, as well as the same wheels.
Some of the fun that comes with owning a CNC machine (the fun is mostly sarcastic).
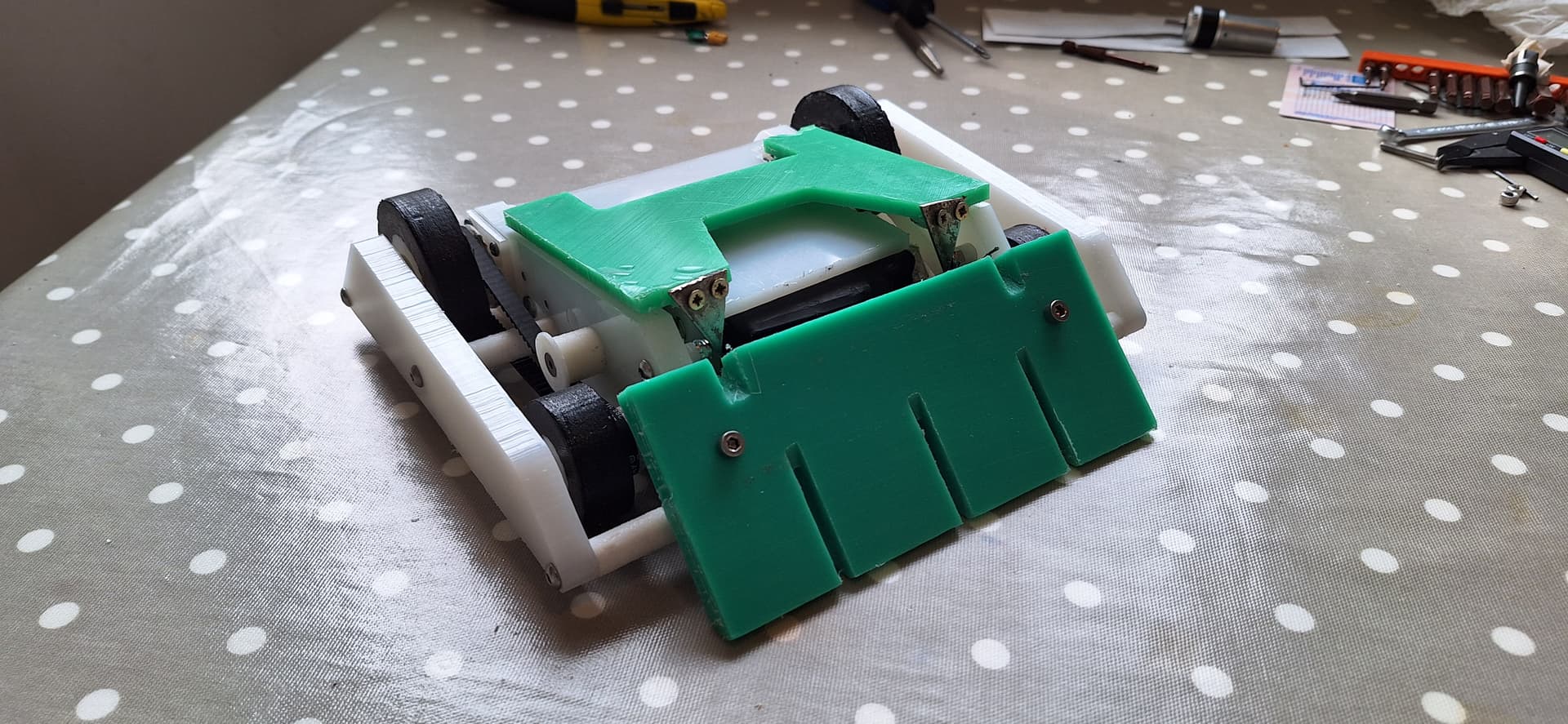
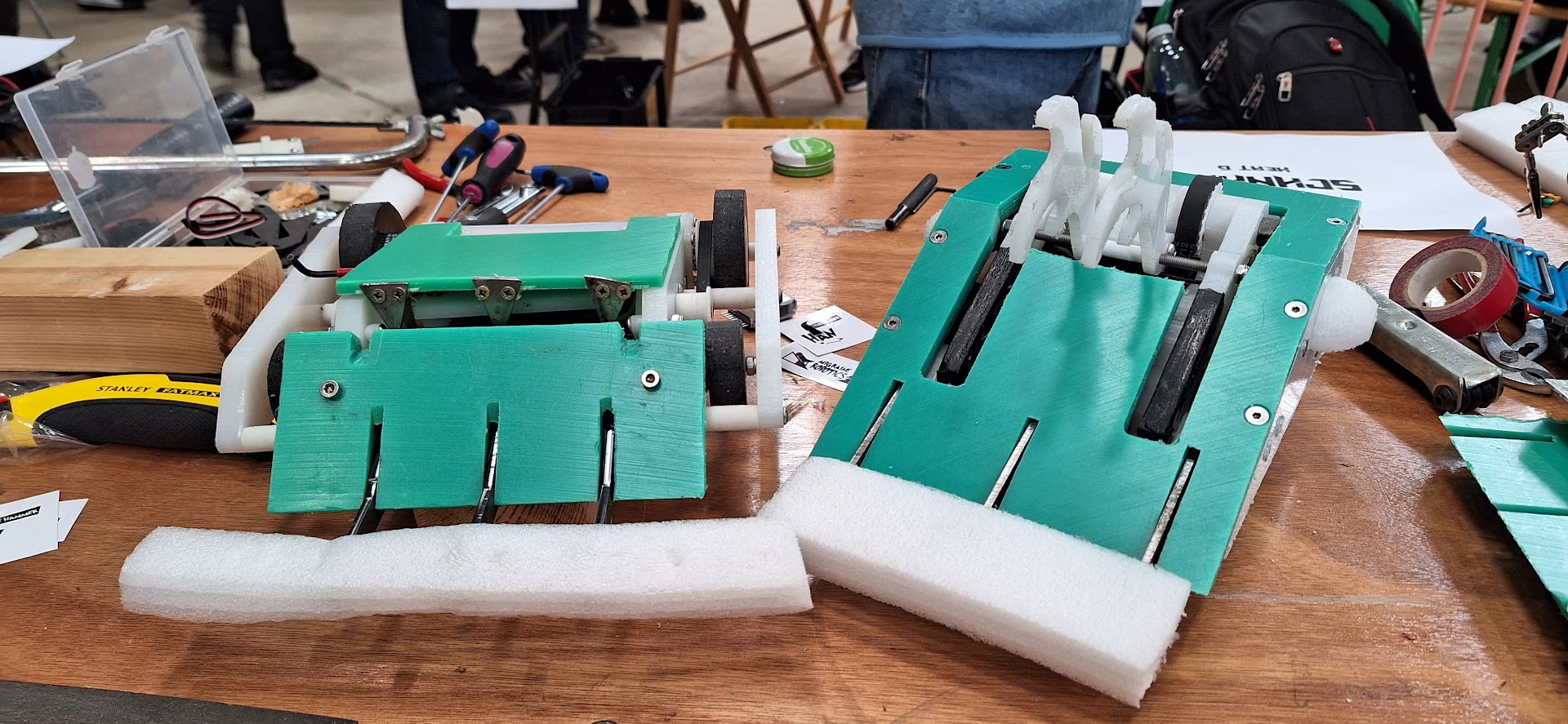
A finished grabber piece. The gap in the middle was a decision to try and counter verts, the theory being that the robot could go head on with less of a chance of getting hit badly.
For the weapon, I was very paranoid of taking a direct hit to the weapon, and that killing the servo gearbox as a result. To counter this, I decided to design in a clutch into the weapon, hopefully I can explain it well enough.
Here's the first part: an M3 threaded bar, loctited into place. The nyloc nut holds the servo horn in place, similar to what a bolt would usually do. The servo arm would be sandwiched between two washers/spacers. They would pivot around the threaded rod, but crucially would not be directly attached to the rotation mechanism of the servo. Tape would be added to the washers later for more friction. The idea would be that the friction of the Nyloc against the weapon assembly would result in the arm wanting to rotate along with the servo horn, though with enough effort it would slip instead. This could be adjusted by tightening the servo arm to whatever I would see fit on the day. Perhaps a little conservative, but with a grabber instead of a lifter I could afford to be, and this can be tweaked during and after the event.
The Nyloc clutch assembly.
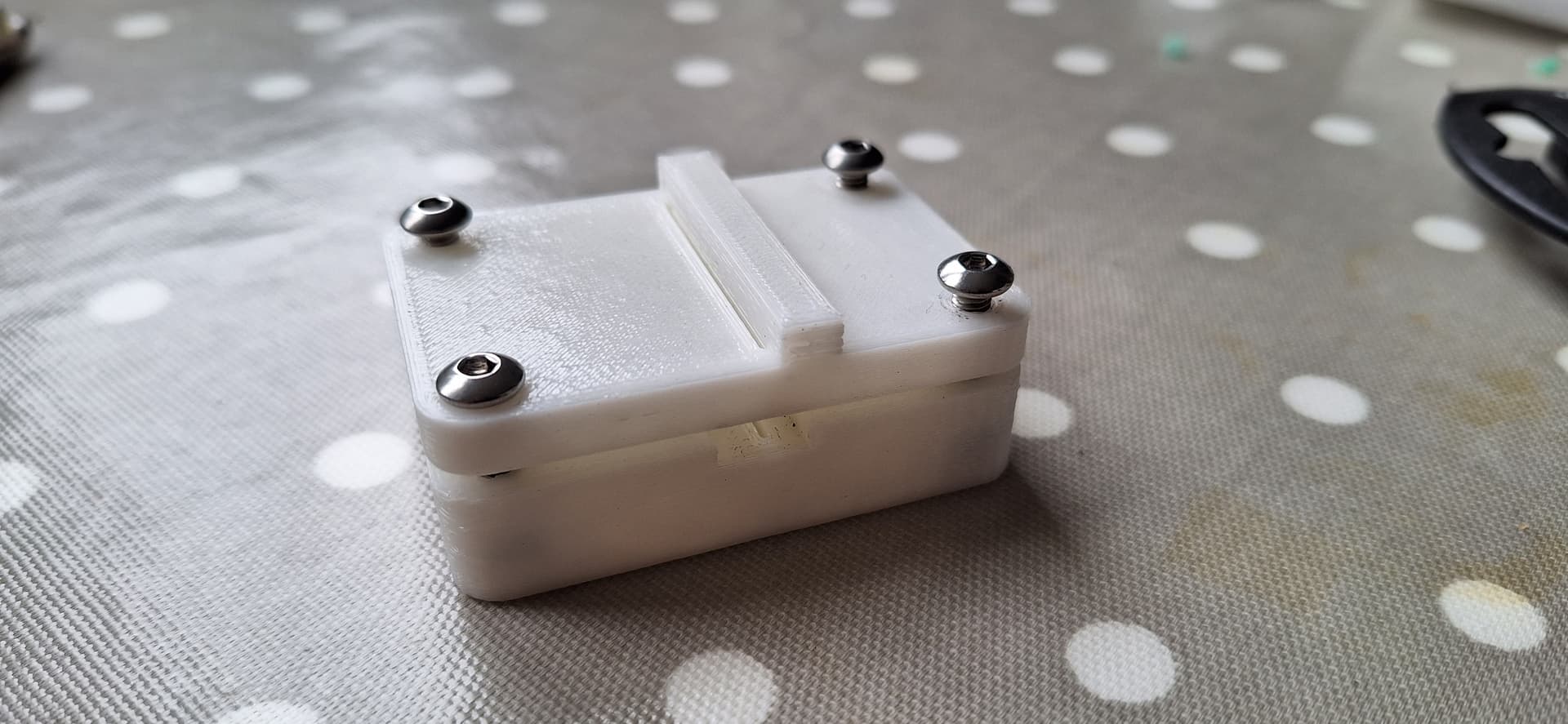
For the spacers for the wheels, I used these 35mm long M4 hex standoffs. I wasn't a big fan of the brass look however, so I printed these sleeves to press onto them to better blend in with the white HDPE.
- FRA
- Forum
- Robots
- Events
- Media
- What's New?
All times are GMT. The time now is 05:25.







 Reply With Quote
Reply With Quote













Bookmarks