

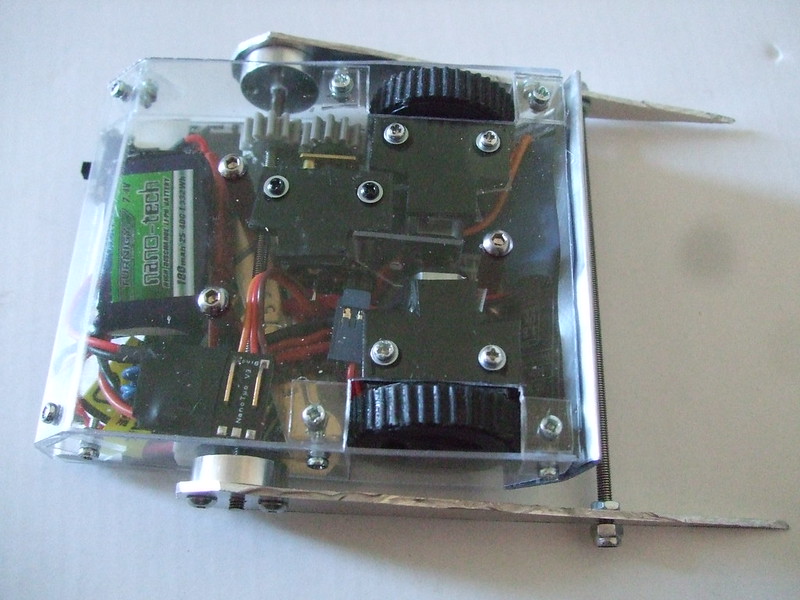
Just a couple of days to go before Botfest, so I thought I'd share one of the bots that I completed last night. Say hello to Sprouting Potato:
It's had a few iterations. First it was gonna be a wedge-shaped pusher, then a servo-angled wedge pusher, then after a minor fail at AWS 55 with my other bot, Suspicious Houmous, I decided to make it a simple 4wd pusher. I should probably stick an 'L' plate on the back, as my driving is AWFUL.
Actually, I had an intention of letting my 7-year-old son drive, but I let him drive it around the front room and he just drove round in circles, sometimes breaking to drive it into a table leg or the entangling embrace of a throw blanket. Maybe he'll do better with an opponent to aim at.
It's not totally finished. The side armour needs a trim, and I need to fix the front screws better (some HDPE will do that, and create a buffer against the motors, too), and it needs decorating! oh, and it's a bit too slow. I'm hoping it'll feel faster in the arena.
The aforementioned Suspicious Houmous is also signed up for Botfest, but it had so many issues at AWS 55 that it needs a complete redesign. Two evenings and a morning to build a robot.. easy!
- FRA
- Forum
- Robots
- Events
- Media
- What's New?
All times are GMT. The time now is 05:58.


 Reply With Quote
Reply With Quote


Bookmarks