
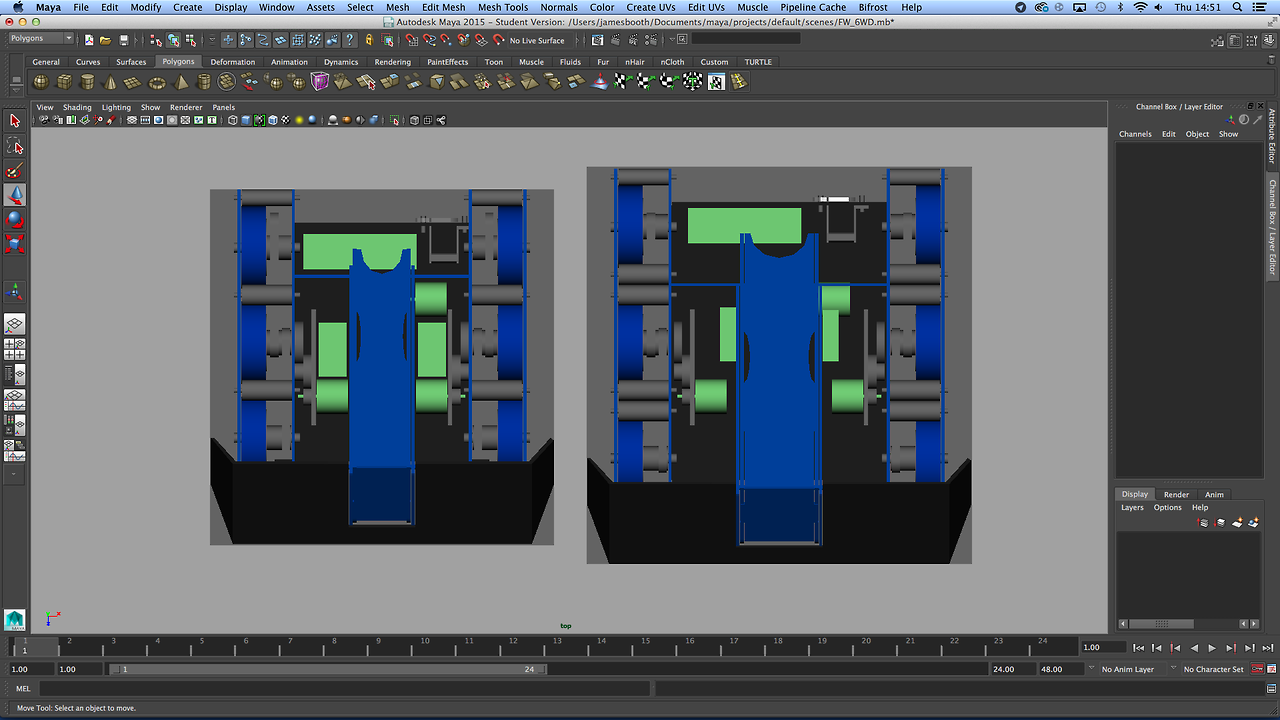
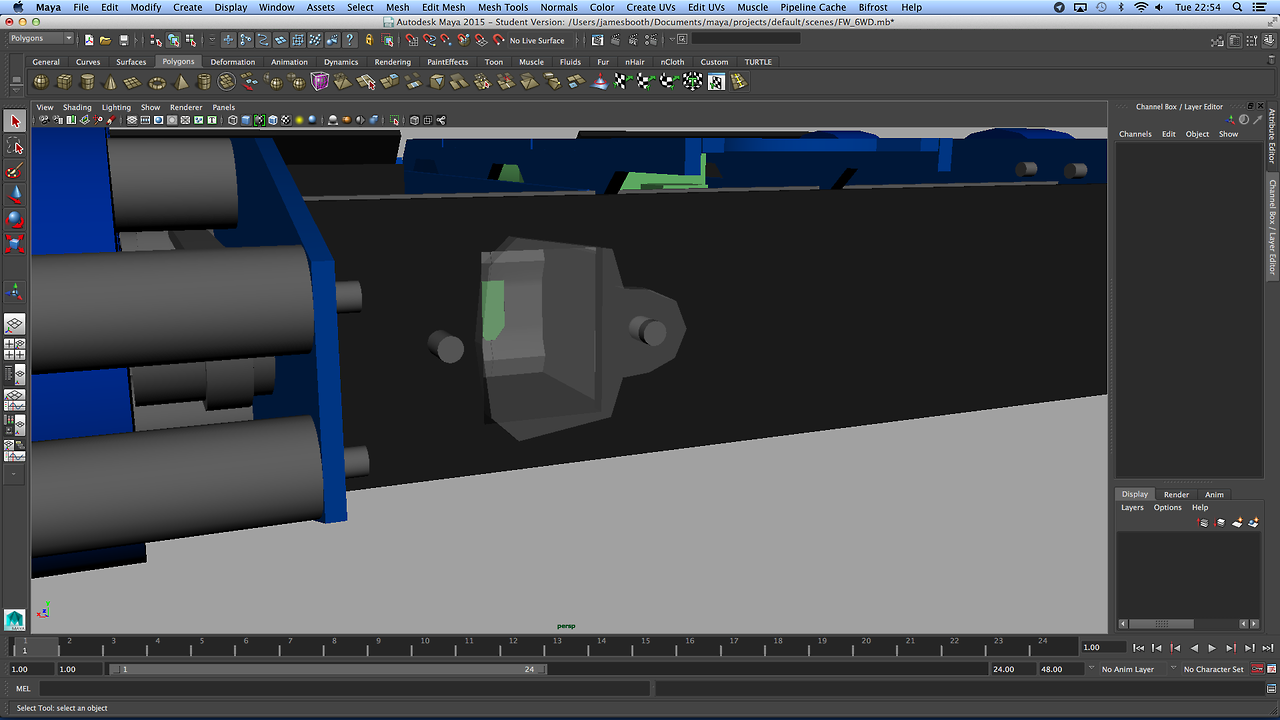
Added link covers, made mounts for XT60 connectors. Narrowed the 6WD (currently 48cm x 46cm x 10cm ) bot and arrange most of the mock internals.

- FRA
- Forum
- Robots
- Events
- Media
- What's New?
All times are GMT. The time now is 07:18.

Added link covers, made mounts for XT60 connectors. Narrowed the 6WD (currently 48cm x 46cm x 10cm ) bot and arrange most of the mock internals.
So I've looked at down sizing my 6WD bot codenamed CSB. I've also considered using brushless motors, gearboxes, drive belts to run the drive.
(smaller version on the left)
That looks very cool, man. Nice and compact as well. I didn't realise you were designing a front-hinger too. If you build this we will need to have a battle!
Thanks Dominic, it's that compact that it's roughly the same size as your FHF bot concept. And yeah we need a FW FHF match. Though I need to actually build Wolf-E first, then again might not hurt to build this instead.Originally Posted by dotDominic

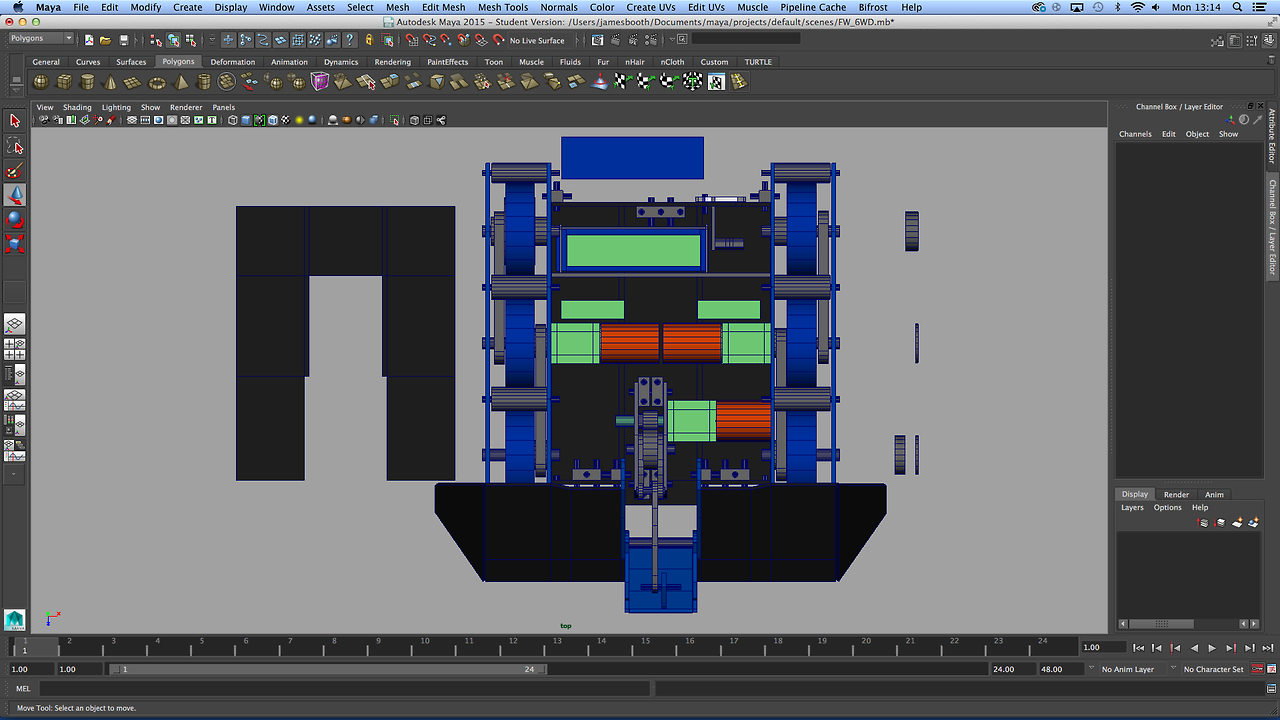
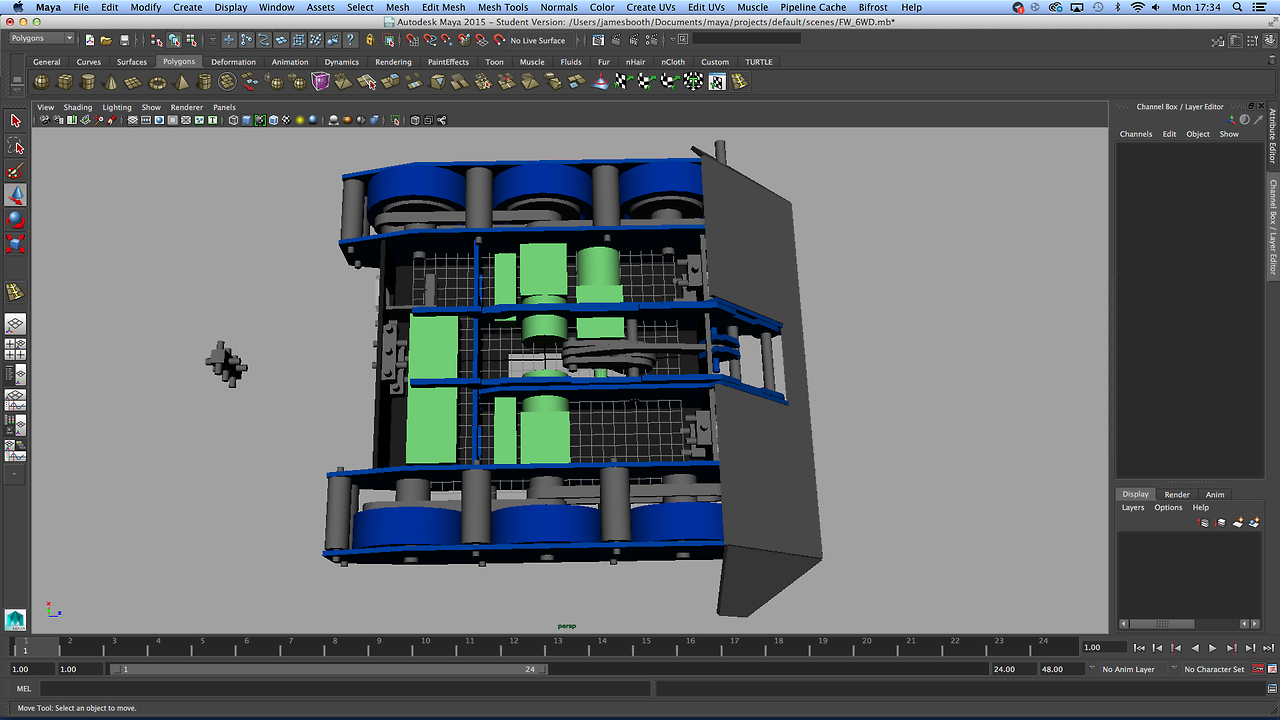
More internal designing, featuring rough renditions of brushless motors with gearboxes and trying out a mechanism based on what I have seen being used in another featherweight front hinged flipper called Amnesia.
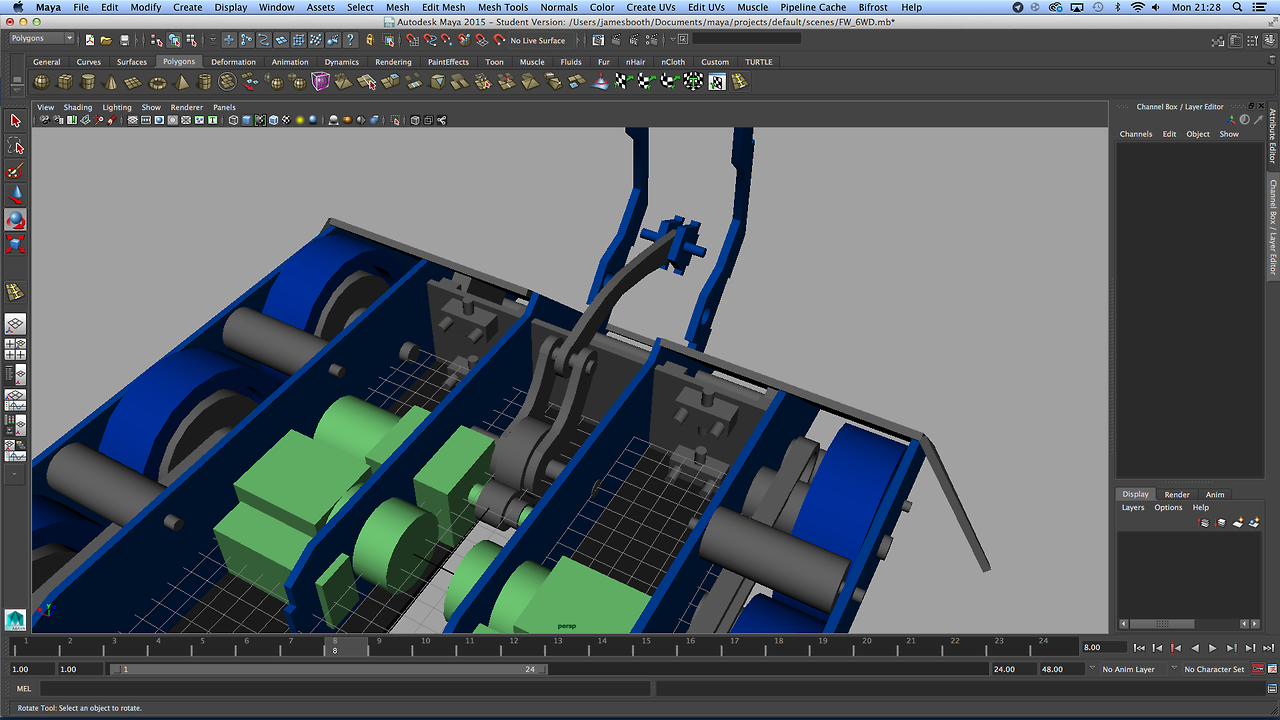
Another Pic with the top plate added. weapon motor and mechanism moved forward.
Thought process behind the design:
The robot as loosely mentioned before will use (hopefully) Brushless motors for drive and weapon using Saturn-16 like gearboxes with the weapon running on a higher gear ratio (64:1) before running a 2:1 ratio gearing for the final stage of the weapon mechanism. As for the drive I'd most likely use a standard gearbox, running the middle wheels directly off the gearbox while the front and rear wheels are run by drive belts. They may need the use of 3D printed wheel hubs with pulleys built in.
As for the materials, most likely some Hardox but the wedge might need to be made of a material that can have bolt holes countersunk so it is flush to wedge bots smoothly.
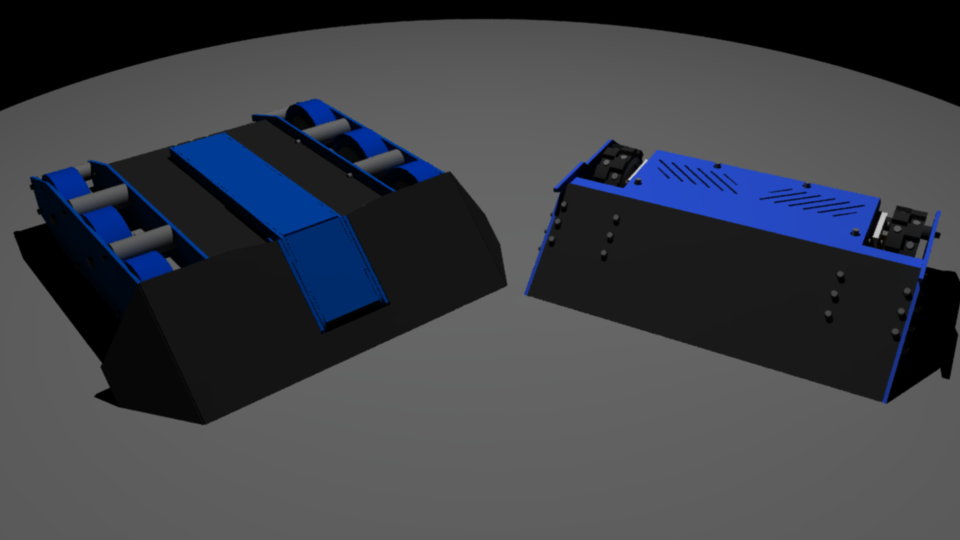
Both of our Featherweight concepts together.
Reminds me of sewer snake.
Kinda see that you mean, except sewer snake's wedge lifts up where as mine doesn't.
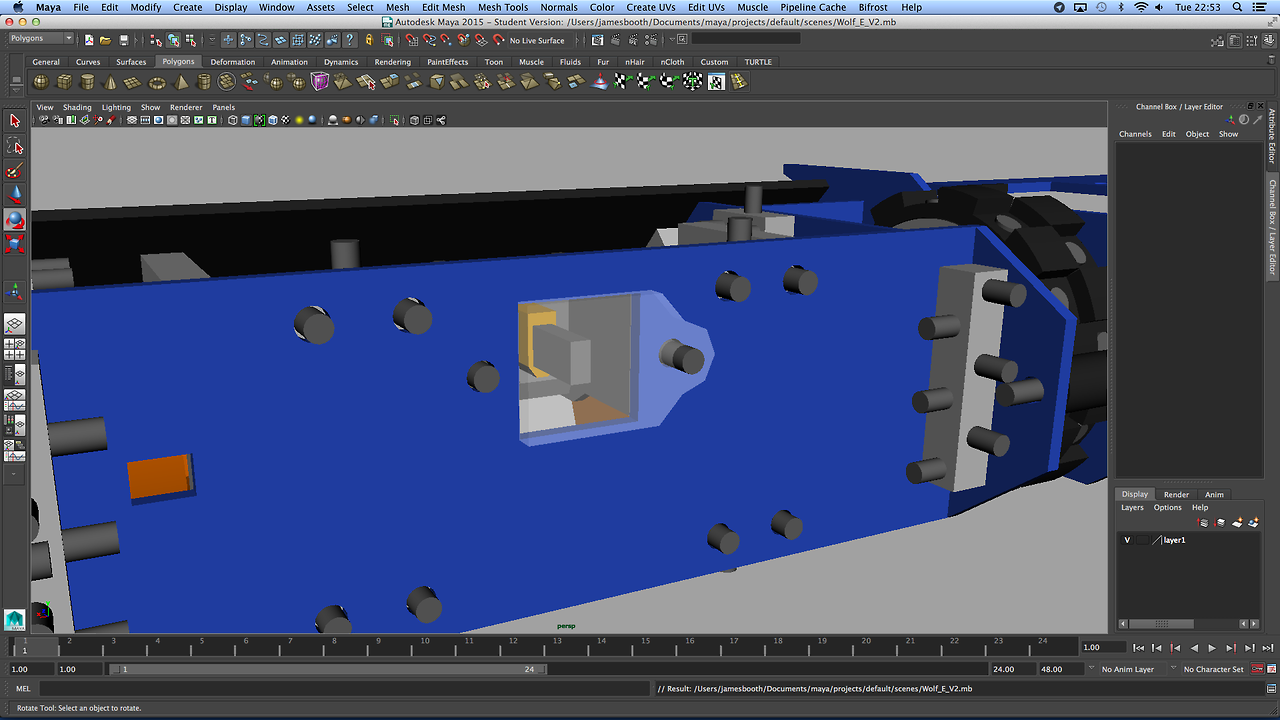
A top down view of the tight fit for the motors, plus the battery has a it's foam and holder. Adjusted the wheels slightly.
 Posting Permissions
Posting Permissions

 Reply With Quote
Reply With Quote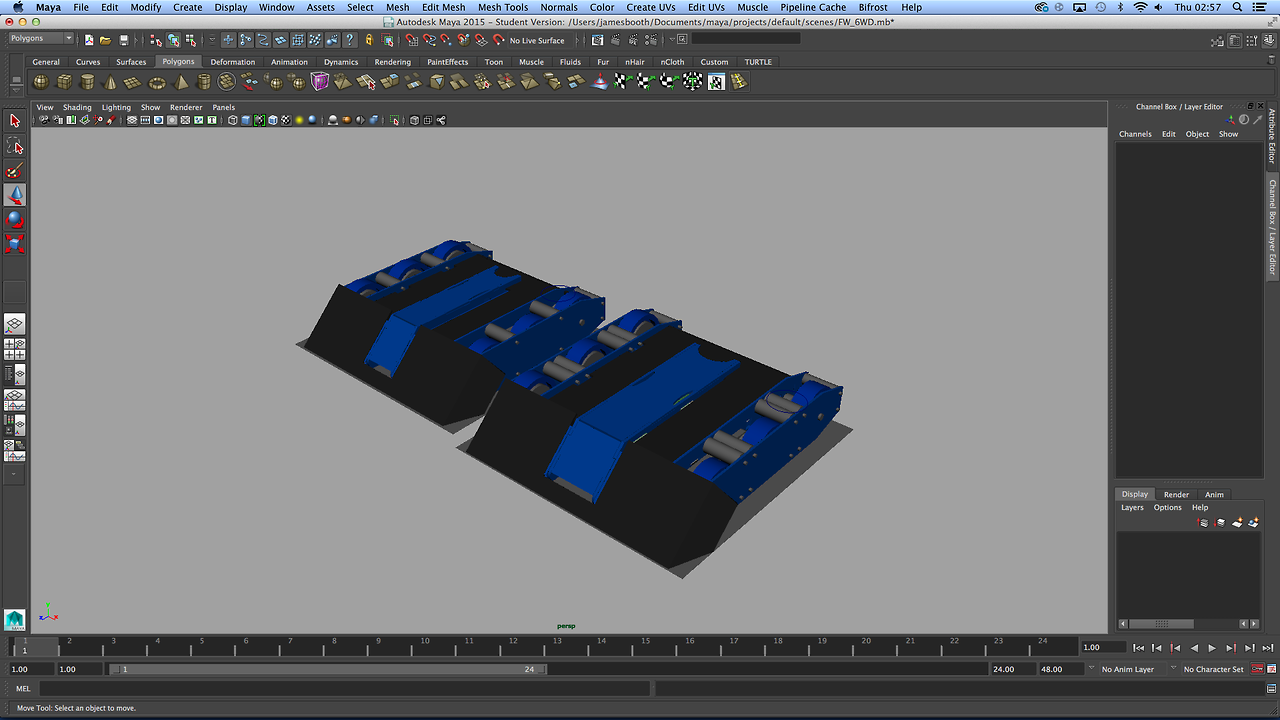

Bookmarks