



It's been a while since i last updated with, well, anything. Finally got around to building a new version of my Beetleweight undercutter Lynx, some of you may remember Lynx as the spinner that always promised so much but then cacked it's shiny robot underpants every time another robot looked at it funny.Originally Posted by mrsam

Well, hopefully that is now a thing of the past, i decided this time that i needed to do Lynx properly, it needed a properly designed chassis, a good drive system and a weapon that is more clever than "ZOMG Lets make it as big and fast as we can and it'll beat all of the everything!!".
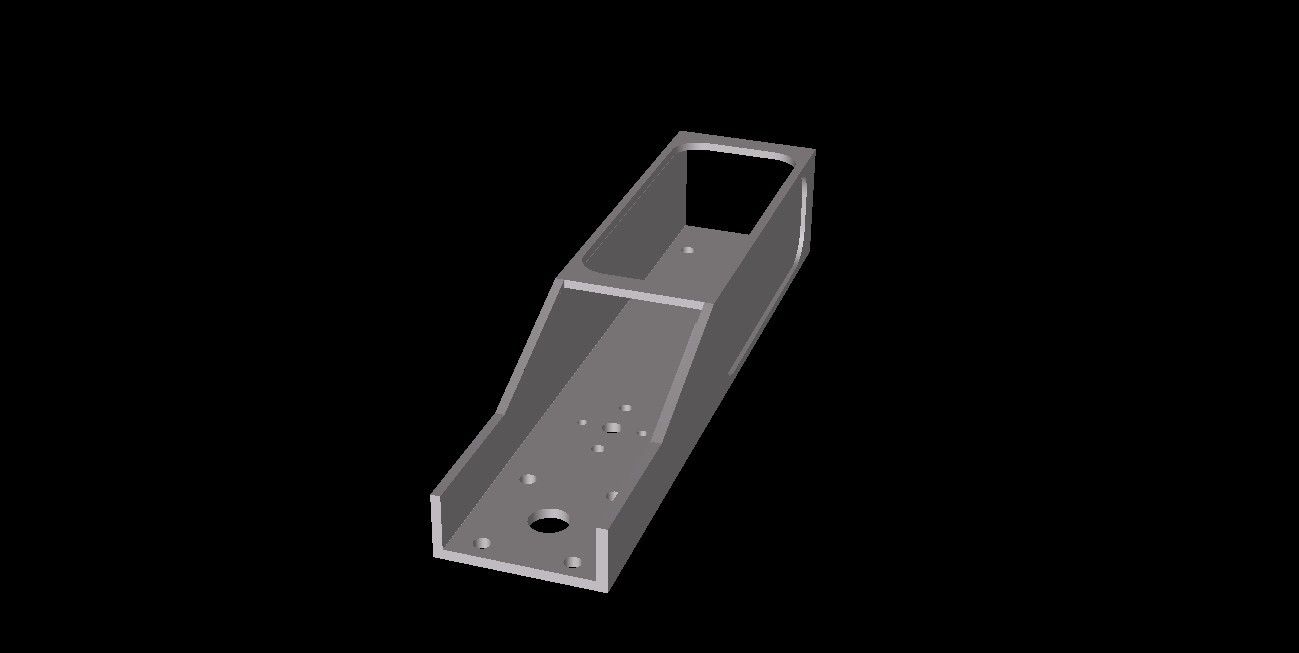
So, on to the actual build, first up was designing a proper chassis, for this i grabbed a copy of Emachineshop (not the best for chassis stuff i know but it did the trick just fine) and got to work CADing something based around the old chassis only sort of.....good.
As you can see, much better than it was before. It's the same grade Aluminium ( 3mm 6082 T6) but it has 1.5mm deep pockets to keep the weight down whilst keeping the structural strength in the frame, it also has thicker drive motor mounts and it's all been welded into one single piece which means a) it's stronger and b) i can save weight by not having bolts.
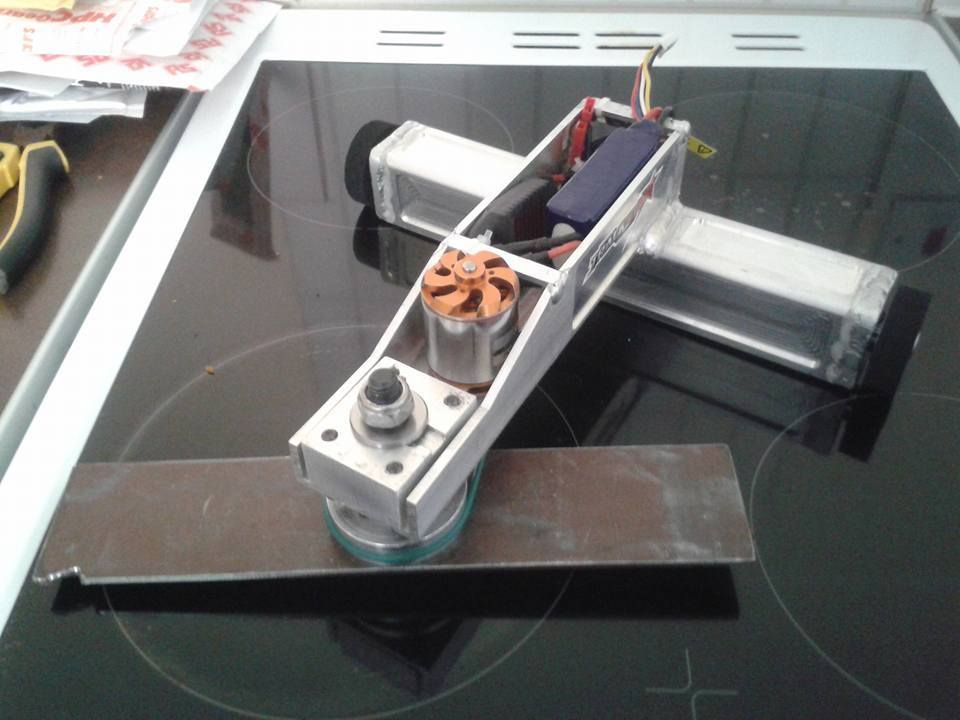
Next up were the internals, now Lynx has always been unmistakably a big weapon and i wanted to keep that but build in some reliability. For as long as Lynx has been around it was using an NTM 3536 1800kv 875w brushless motor....which is great if you like that sort of thing. the problem is, it had too much speed and not enough torque for my liking. So time for a change, the weapon motor is now a Turnigy 3548 1100kv 910w motor, i'm also running this on 4s instead of 3, so more torque from the motor, a higher voltage and a more sensible speed of 6000rpm.
I didn't take many pictures throughout the build so we've skipped to a nearly finished robot, you can see the new brushless set up and frame and how everything kind of...fits? Wait wait....things fit in Lynx? what kind of sorcery is this?
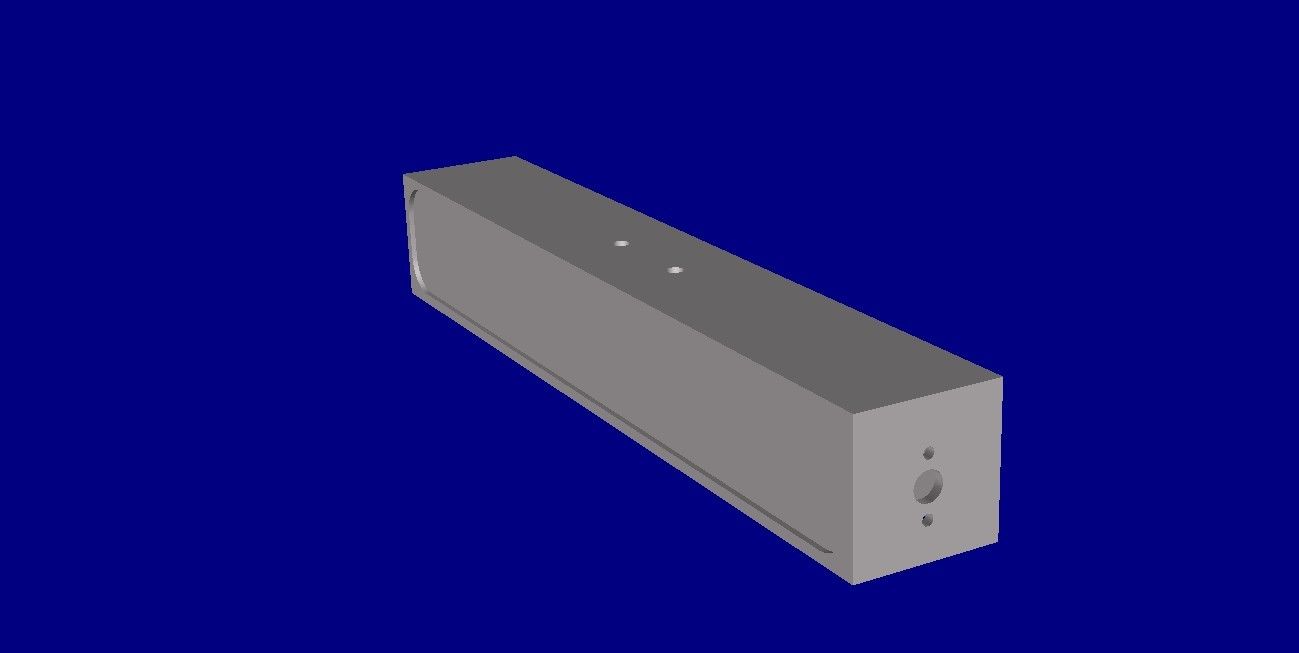
Glad you asked, Lynx has always had an internal space problem, i've always just crammed everything in and kind of hoped for the best. I could hardly spend all this time and effort on making it better and then shoehorn all of the bits in like some sort of cretin could i? So i decided to make use of the gaping amount of space in the rear spar and mount all of the drive electrics in there. The drive this time is a bit of an experiment as i'm using small brushless outrunners, i've done my research don't worry. It uses 25a Turnigy Trackstar esc's and tiny 1800kv outrunners mated to the very chinese ebay gearboxes. The whole set up runs at 2s which seems to give around the same speed as the normal brushed motors but more torque. This coupled with Lynx's snazzy new foam wheels and the extra weight over them by putting the electrics in the rear means that Lynx actually sort of drives...quite well in fact.
So, that's the new Lynx, well done if you managed to sit through and read all of that. It'll be Debuting at the Kinematic event in Scotland on the 6th of August where i'm hoping the upgrades will mean it does well.
Cheers! See you all soon
- FRA
- Forum
- Robots
- Events
- Media
- What's New?
All times are GMT. The time now is 08:59.

 Reply With Quote
Reply With Quote
Bookmarks