
That's class man. Gonna FSU
- FRA
- Forum
- Robots
- Events
- Media
- What's New?
All times are GMT. The time now is 16:08.

That's class man. Gonna FSU
Thanks guys. I'm going to skim the belt groove down a touch (I can't go much as the disc pins are just beneath) which will hopefully make the belt a little less tight.
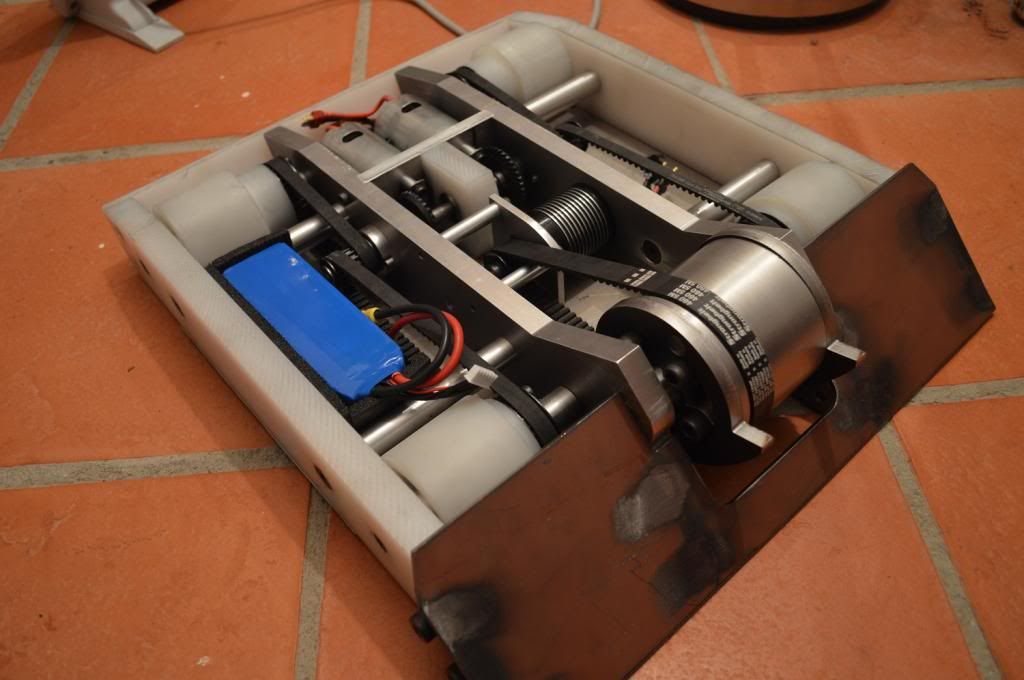
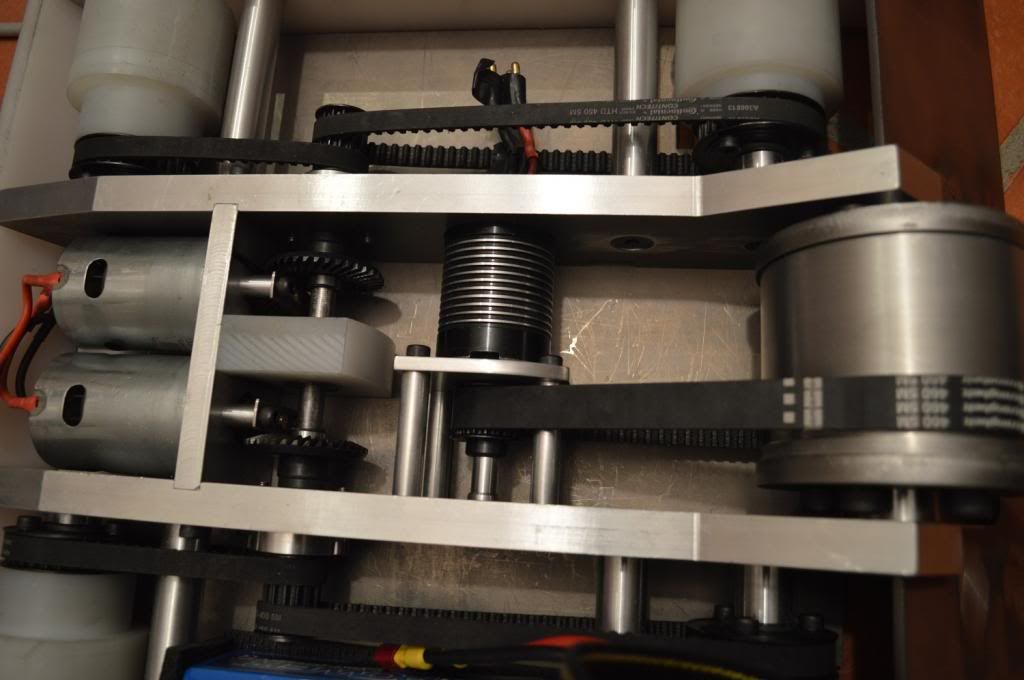
I have started with the wedge now, it's in place here, tomorrow I'll make up all of the spacers (and change the outer bolts, those ones aren't final) and grind the leading edge. Still got tons to do!
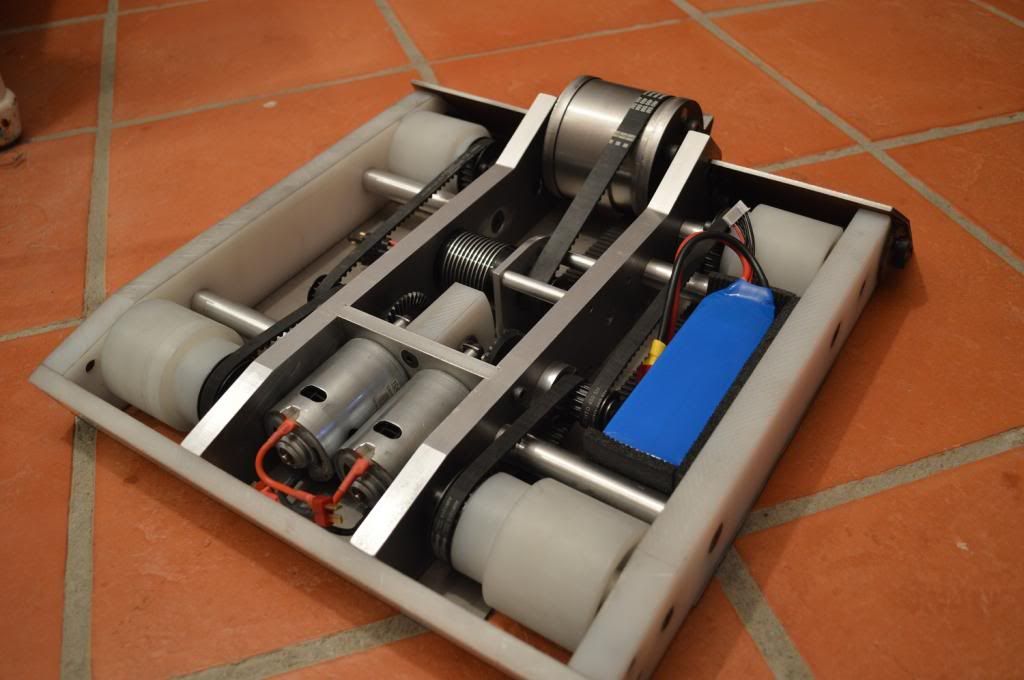
Some pics, please excuse how grubby it all is, white HDPE is the ultimate in making workshop crap visible.
Thanks again to Mario for organising and welding up the wedge.
So swish man, flash git you.
So many awesome custom parts! Rango makes Conker look like she was bought off the shelf. This is just amazing! :-D How long have you spent building and working on Rango? 48 hours, 72 hours of solid work? More?
Looks a nice clean build
Will the wheels have some tyre or something on for grip?
Yeah, very interested to see those wheels with tread on; the huge contact patch should mean excellent pushing power.
Thanks guys. Yes, tyres are on. Did a very very brief test drive in the living room (front is too low to test properly) but in that time the ESCs got very warm. I haven't a clue why. The reduction is now rattly-loose-smooth, I really don't understand it. The 885s have got buckets of power demonstrated by the test, but even the 14awg wire was getting warm after just 40 seconds or so of barely touching the drive.
Don't know what else can be done, I'm amazed that the amp draw must still be so incredibly high. Almost undoubtedly, the tz85s will implode half way through fight 1...
Are you sure the battery isn't shorting eg. Across the motor casing? Or is the reduction from the motors too high? Are you running off 6s? Do the motors get at all hot?
It sounds like something must be wrong! Have you tried running with the belts taken off?
No issue in the wiring for sure, have checked. Running 5s. With the belts off there's no load and it goes fine, but that doesn't really help, it kinda needs the belts :b
Motors barely get warm.
I wonder whether this is the first bot to be running relatively low reduction (5.75:1 on 75mm wheels is more than many) with tz85s. It rolls to a stop rather than stops suddenly like T2 always did. Perhaps the braking function of the tz85s is fighting the forwards momentum of the bot, and because grip is so high with the phat tyres, they're being overridden, and as such are shunting power around constantly with no where to go but back into the ESCs.
Aaron? Any ideas?
edit: to clarify, that is indeed what is happening in terms of visible behaviour. It rolls to a stop whereas our other bot, T2, running 24:1 planetaries, stops dead.
Last edited by Ellis; 5th April 2014 at 19:18.
In all honesty I think it's your ratios that are way off. What sort do RPM are those 885 motors rated for? On my astro's, which are about. 620rpm per volt I used to run 15:1 with 75mm's as it was fast (9mph on 24v)) with bags of torque. I've lowered the ratio to 16:1 on Killer Joule with the same wheels. If your motors are a similar speed to those then that will be your issue. It's only the Genuine speed 900BB Torque motors with a low enough RPM to run that kind of ratio.
 Posting Permissions
Posting Permissions

 Reply With Quote
Reply With Quote
Bookmarks