

Yeah, it worked well in Inertia XL but obviously didn't see the long term effects that had on the HDPE itself! That, and with how much power is in this bar, last thing I'd want is it to warp itself after a couple of hits. Problem with it too is that it'd have to be structural as well by design and I'm not sure how the lot would last!
I see, I think I get what you mean! It's a bit of a debate really, though if it's strong enough I won't really need to take it apart, I guess?
I'm starting to side away from aluminium for this one to be honest, looking at the steel bulkheads as more of an option now, after looking at how Catastrope and Demon do it, it's actually starting to sway me a lot more towards that kind of design. Nice as aluminium would be, I'm worried it'll be a little too heavy, or not strong enough by the time I've machined them down as much as I'd need...
- FRA
- Forum
- Robots
- Events
- Media
- What's New?
All times are GMT. The time now is 10:27.

 Reply With Quote
Reply With Quote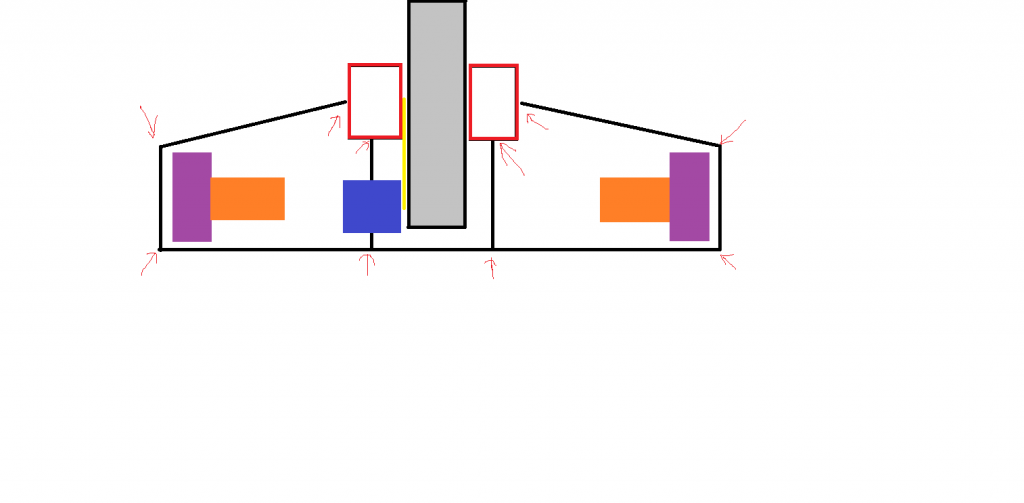






Bookmarks