

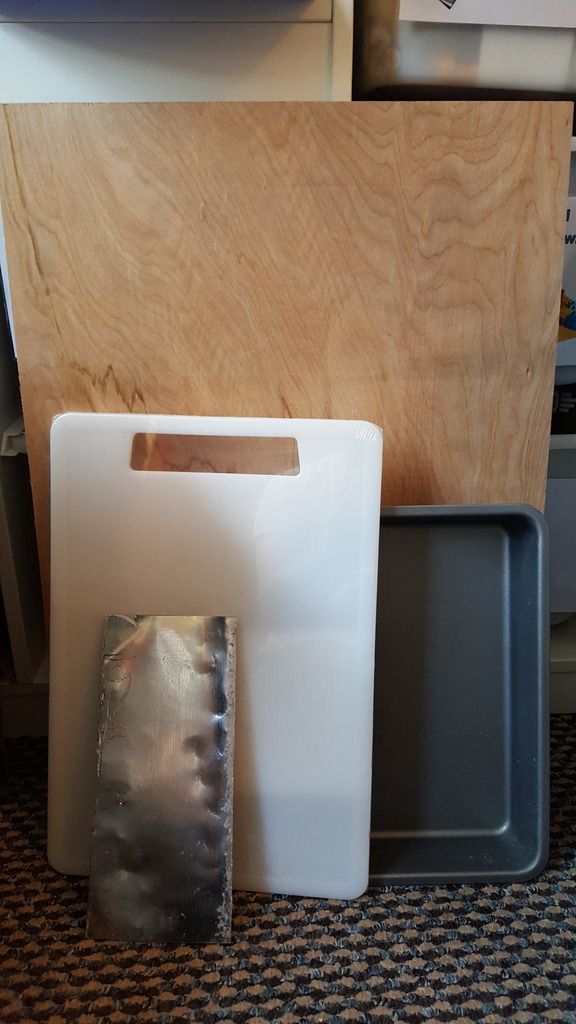
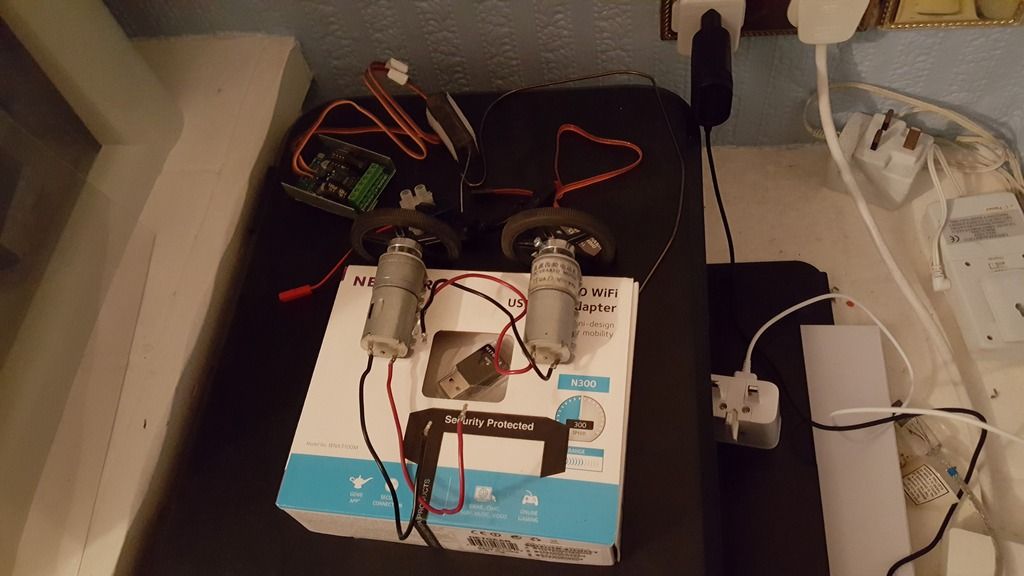
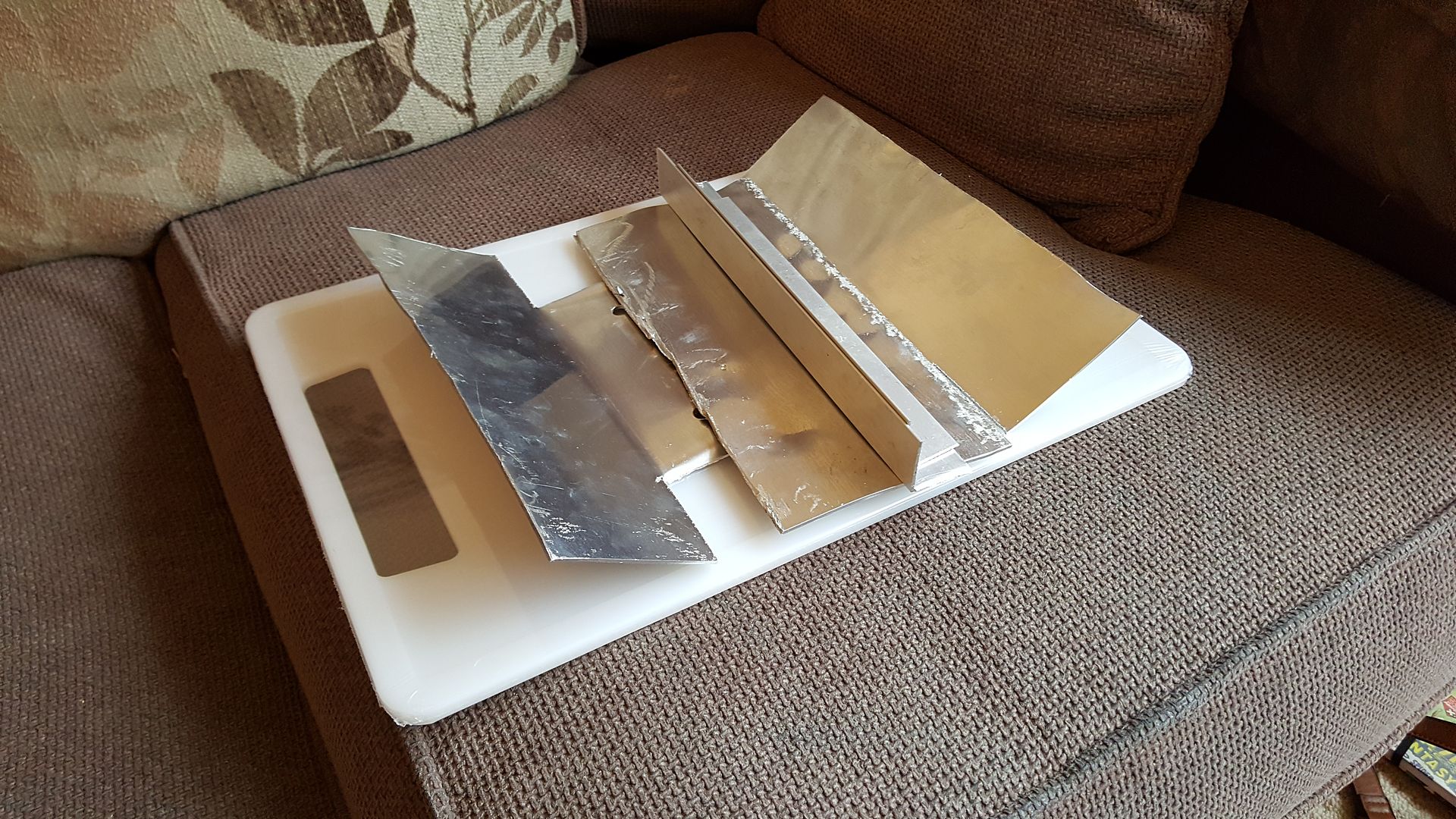
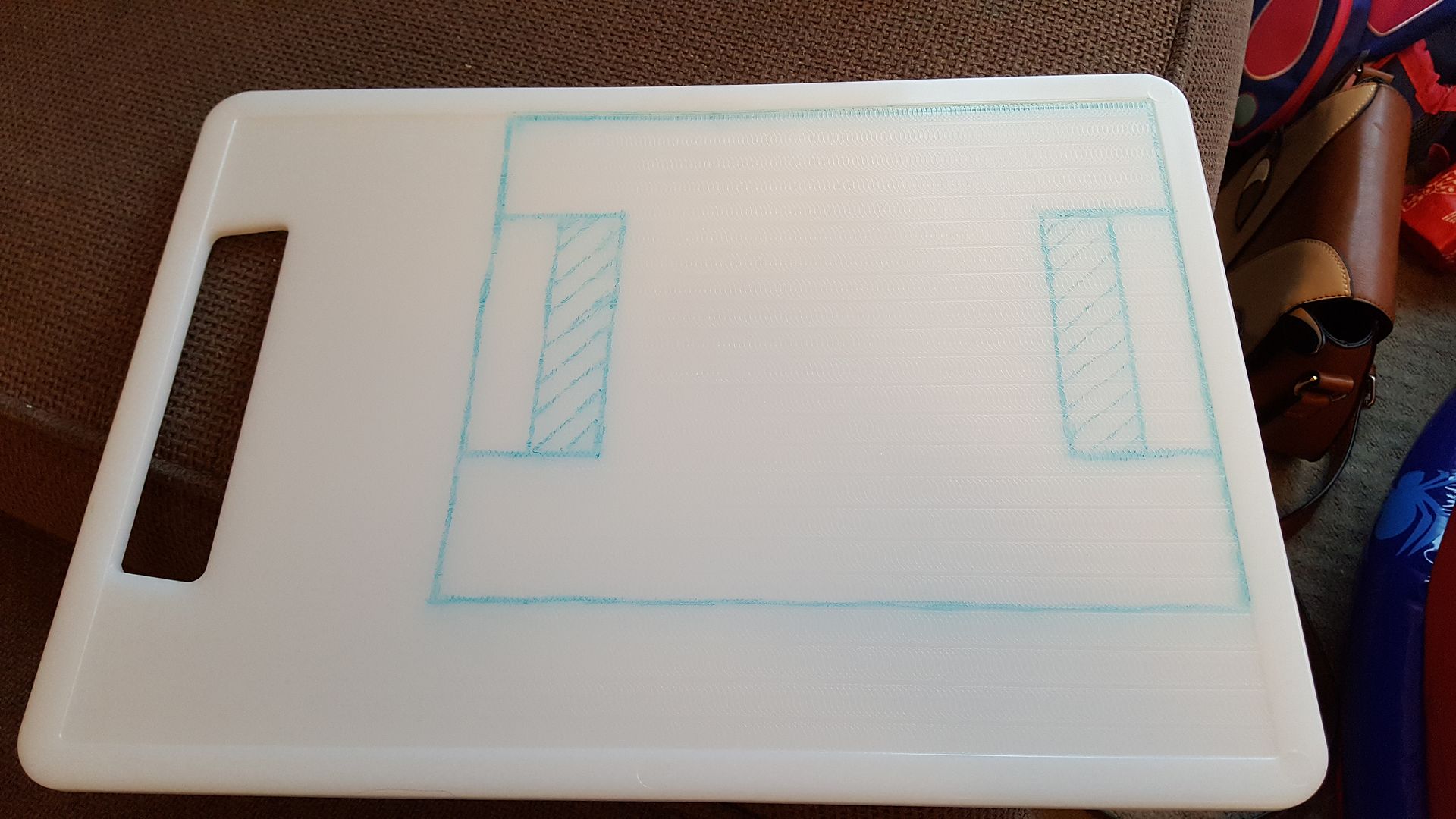
Did a bit more today, decided to call it Rust unless it's already taken. Spent ages n ages making the front bit with literally just a hammer and the corner of a paving slap in the garden patio. Can't believe how stupid I must sound lol. I started with a sheet of 2mm ally, then just snapped one side off by hammering it one way then the other n it just sort of snaps. Then "cut" the other dimension the same. I have angle grinders n all sorts but cant be bothered dragging it all out lol. Then just hammered it all into shape checking it a bit at a time and eventually got the fit right. Then drilled it and bolted it on lol. So yeah. I ordered a servo from hobbyking to attach the grabber dabber onto, which will just be a really basic curved bit of *something* to hold people on the ramp thing. I made sure to get a 20kilo servo with metal everything on it, cost about 15 quid plus p and p. I want a bit of torque but can't be bothered with it pulling too many amps. When it gets here tomorrow I'm planning on starting cutting and shaping the pincery thing by hand till it feels right. Gonna attach that to a servo horn I've home brewed but forgotten to take a picture of it. Then attach the servo down somehow in the front of the robot with the batt, rec and esc and tie wrap the drive motors in, hey presto. Need to get some thin light plastic from somewhere to make a lid as I have no weight left.

- FRA
- Forum
- Robots
- Events
- Media
- What's New?
All times are GMT. The time now is 13:23.

 Reply With Quote
Reply With Quote



Bookmarks