
Built a new beetle, Rancid 2. 1000rpm gearmotors, 60mm wheels, new tiny 12V pack and the trusty sabertooth. Just need an event now lol.

- FRA
- Forum
- Robots
- Events
- Media
- What's New?
All times are GMT. The time now is 19:55.

Built a new beetle, Rancid 2. 1000rpm gearmotors, 60mm wheels, new tiny 12V pack and the trusty sabertooth. Just need an event now lol.
Next beetle even is Sunday the 10th of May at the Court Leet Hungry Horse, 174 Worcester Road, B61 7AY Bromsgrove
https://www.facebook.com/events/437861699712893/
all fear the box..... how does it drive ?
I got an email from Kinematic Events saying they had no interest from the other beetle builders so we're only doing pay to drive at Bromsgrove.
It drives really nice with the esc sensitivity turned down and the smaller wheels. Bought some proper motor brackets so it tracks a lot better. Also tried copying unmakerbot's driver style n it's spot on.
Hey just so you know, a few more beetles have signed up so we can have a fun competition. So come on down. ;-)
Oh cool will wander down and bring robot
This sounds totally daft but it's only just dawned on me, when you swap your electrics into a new robot leave everything plugged in! That way you just supply power and motor cables and it takes ten seconds to get it running!
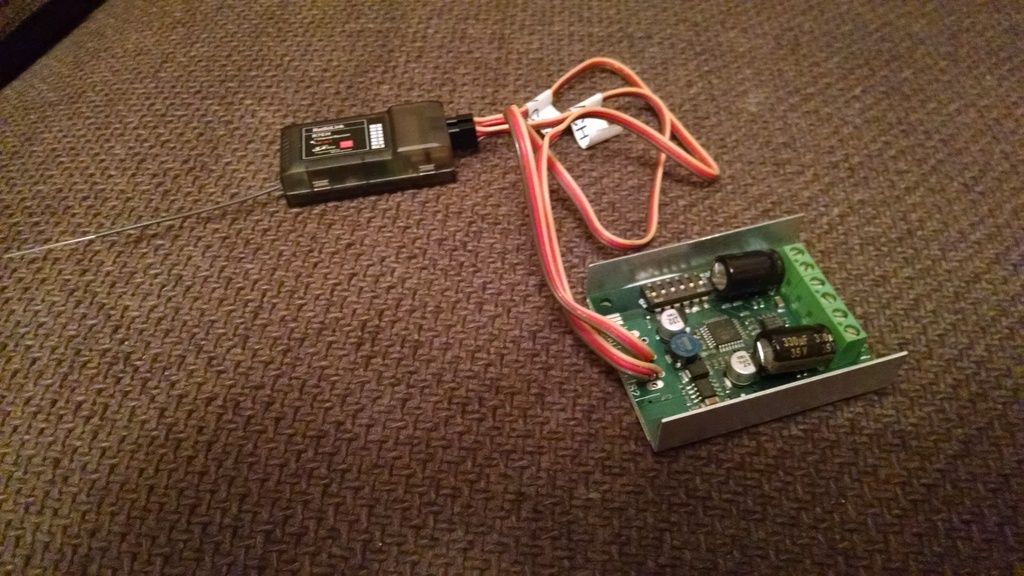
Right well before Sunday thought I'd put up a picture and a video. Been having a drive of robot properly and discovered an epic fail. The robot is made from a maplin project box a mate was chucking out and it looked about right. Upon building my stuff into it and cutting wheel slots I discovered the width was too thin to get both motors and gearboxes end to end so I ended up having to stagger them a la Little Hitter et al. The knock on effect of this was that the battery then didn't fit properly, and I've had to put a round head bolt under the back corner to sort of prop the robot up. The battery over the bolt makes it dig in and so if it accelerates hard it pulls to one side. Accellerating gradually = no problem.
Am a bit gutted. And it's not invert-able. Which is just fab. Anyway, I actually haven't set this one on fire so am gonna see if there are any spinners about on Sunday to chuck it in with. If the concept of an ally can with a lid works I'm gonna get on to the fabrication place to make me a proper chassis with lid and move my stuff into that. I've also discovered that the 1000rpm gear motor shafts are pretty fragile and have bent a couple, dunno if anyone else has the same problem? Below I stuck up a picture of the insides.

Last edited by daveimi; 8th May 2015 at 06:49.
I'm not really good at serious robots so built this over the last week or so and am gonna take it along on Sunday.

I haven't had any issues with shafts bending, although the most force Ash has felt is from it's own weapon. Foam tyres on Fingertech hubs would probably help with reducing force applied to the shafts if it continues to be a problem.
 Posting Permissions
Posting Permissions

 Reply With Quote
Reply With Quote
Bookmarks