

Hi!
First, let me introduce myself. My name is Hugo, i am 20 years old and i am from Portugal.
From the age of 12 to 14 i have build some robots with parts from old rc toys and sush, and at 15 years old i built 2 better robots using cordless drill motors and motors from car refrigeration system as weapon motors, but all those were controlled by rc toys electronicas and relays...
Now, at age 20, that spark in my heart reappeared!
There is no one here in Portugal to compete or to fight against, but i hope that building this robot and showing it will encourage people in my city or cities next to mine to do the same.
Introductions made, lets start the build talk.
My plan is to build a beetleweight according to the FRA rules but, if i can't build it up to 1.3kg, i will pass to mantisweight, 2.6kg. It will be a wedge robot, because of the simplicity, lower cost and i already have a 2ch 27mhz band radio system with changeable crystals.
Parts/Materials i intend to use:
Radio: 2ch 27mhz band (have)
Chassis/body: HDPE mainly with top and bottom aluminium and stell for the wedge
Motors: 2 electric screwdriver motor and gearbox (have)
Wheels: 2 colson like (will be bought this week)
Esc: i will make 2 h-briges using transistors that can handle 24v 10a
Batery: 4.8v or 6v ni-mh (not sure how many mah's my cells have)
It will look like the wedge on this video, but much faster.
http://www.youtube.com/watch?v=HGodbVbgo6I
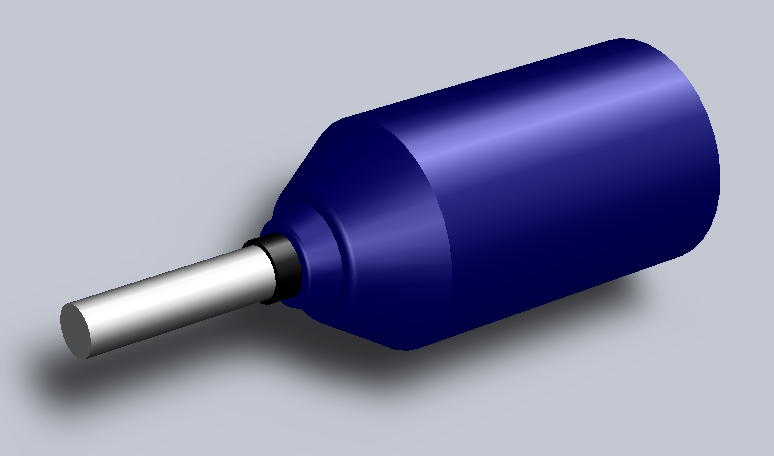
I bought the 2 electric screwdrivers today and dissasembled one to analyze the motor and gearbox.
Typical insides like you can see on the photos, with the motor and gearbox held together by the shell.
This is where i start to need your help. Has anyone used this before? I am thinking of two ways to use them on my robot:
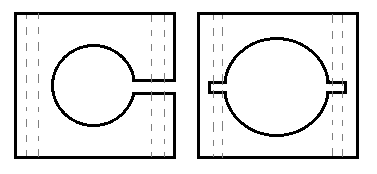
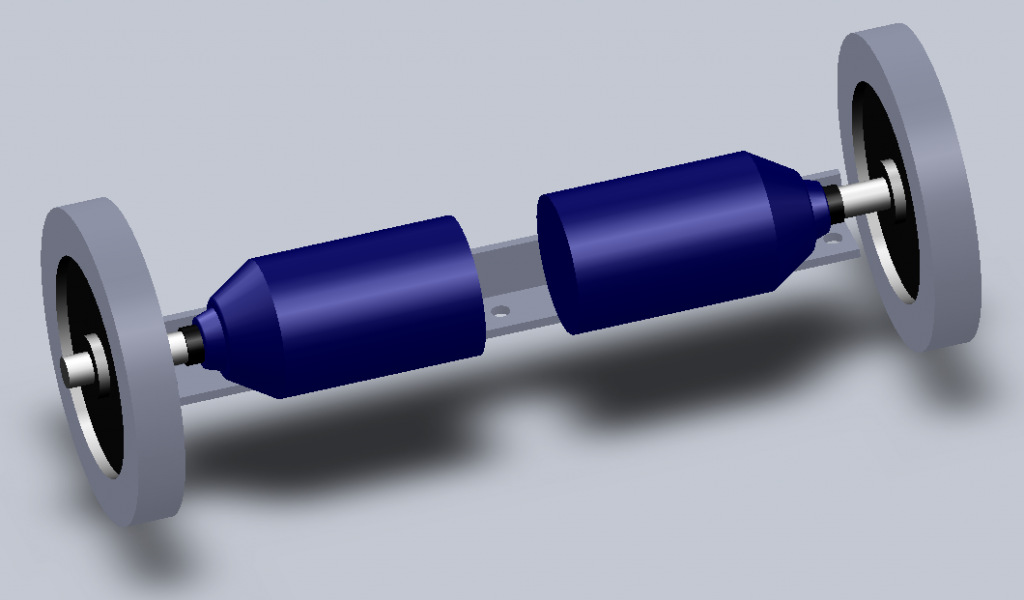
First one is to make two mounts like these:
The second is to used two of these:
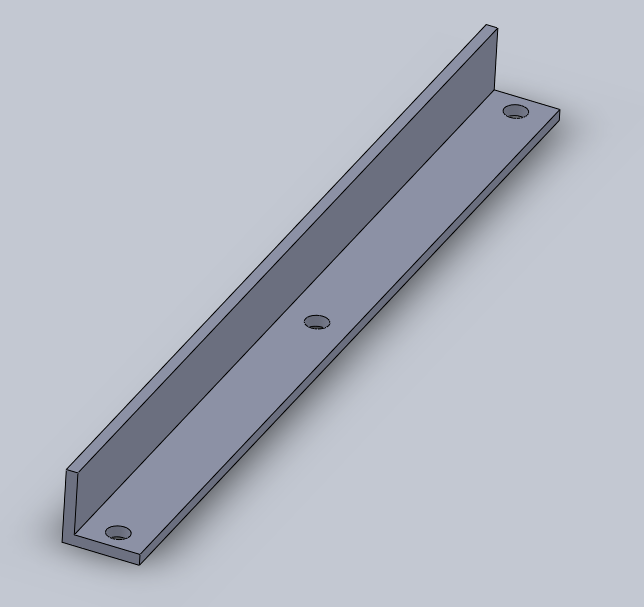
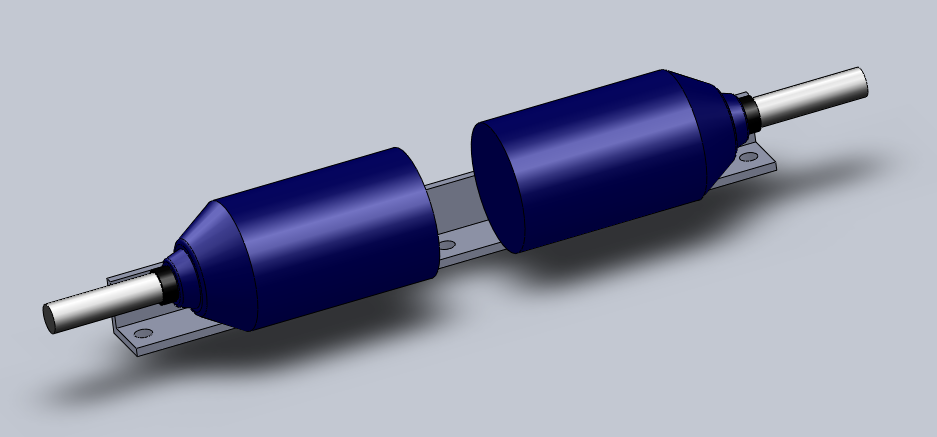
to attach the shell of the screwdrivers to a L shape piece of aluminium or stell like this:
I think that the second way is better, besides being simpler will hold much better. Those two little supports with the holes on the gearbox look very fragile and they may break very easely. But, what do you guys think will be the better way to use these motors/gearboxes? I am open to any suggestions.
My second question is: the screwdrivers are 3.6v but by the size of the motors, i think they are undervolted 6v motors... What do you think they are? should i run them at 6v or 4.8v overvolting them a little? I don't want to take the risk of burning them...
This concludes my first entry on this build diary and i hope anyone can help me with these and maybe some future questions.
P.S. My english is not the best, but i try hard to make no mistakes. I think you can understand my writting and grammar...
- FRA
- Forum
- Robots
- Events
- Media
- What's New?
All times are GMT. The time now is 05:39.






 Reply With Quote
Reply With Quote



Bookmarks