

2 Gimson GR01's
- FRA
- Forum
- Robots
- Events
- Media
- What's New?
All times are GMT. The time now is 23:07.

2 Gimson GR01's
Previous page, man.Originally Posted by mattsdragons
Edit: Mario beat me to it!
That's nice, didnt look at the other page, just the video
Very nice, have u any plans to stop it getting stuck on its side?
Havent tested yet as I did a complete strip down to do some welding
Its not too obvious but the side panels are not vertical
I'm banking on that plus the axe changing the centre of gravity will force the bot upside which I can self right from.
If that doesnt work then some spikes on the side (I liked the look of the kebab skewers that someone else posted) look fun and would make it more unsteady
Still pondering a scooter motor. Those buggers are heavy though (MY1016 are 2Kg) - I know the Aussies use them
MY6812 are quoted as 0.42 Nm @ 24V
MY1016 are quoted as 0.61 Nm @ 24V / 2932 rpm [max efficiency]
These would really need a 2 stage reduction
Gimson's are 1.41Nm at peak
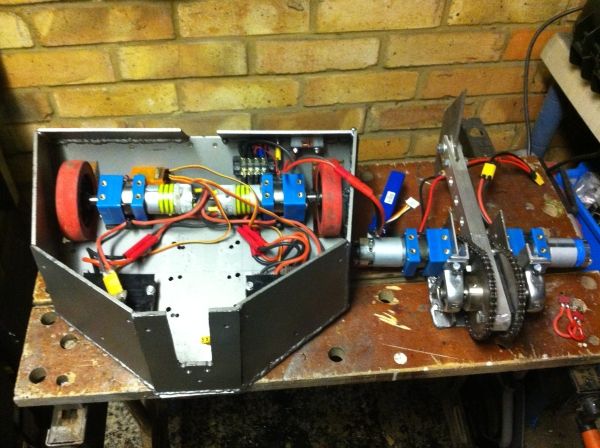
My main problem is packaging. The battery is higher up than I want it to be. [it fits but feels too vulnerable]
Might move the motors up to allow the battery to be packaged in the guts of the machine and moving the electronics (TZ85A's) to one side.
I can save weight by moving from pillow bearings (convenient but heavy) to simple bushing. For now its a runner (well, once its all bolted back together)
Much more than 1.41Nm 'at peak', I think you're quoting the maximum efficiency torque.
Don't forget you need to get the li-po out for charging and in the stress of the pit having it buried deep in the robot is the last thing you want.
A couple of videos just to prove to can get a scooter motor powered axe into a 5mm steel chassis and get it under 13.6kg
Not the best camera angle and you should ignore the fact that the drill gearboxes fell out of the robot
nice find on the videos, I like Avenger and Huntmans axe bots
Good write up at http://robowars.org/forum/viewtopic.php?t=734
I will be sticking with the current design and making the battery well package and accessible (something to ponder over Christmas)
 Posting Permissions
Posting Permissions

 Reply With Quote
Reply With Quote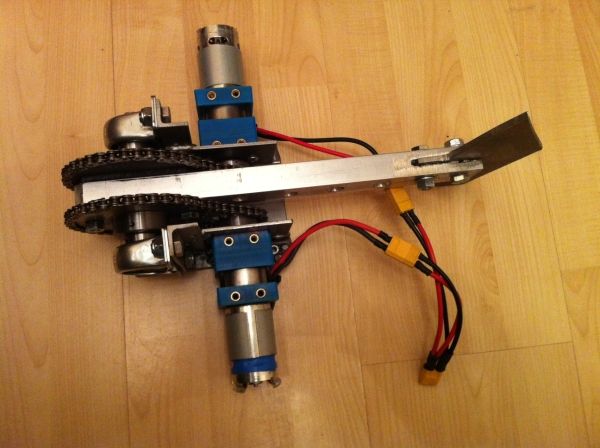

Bookmarks