

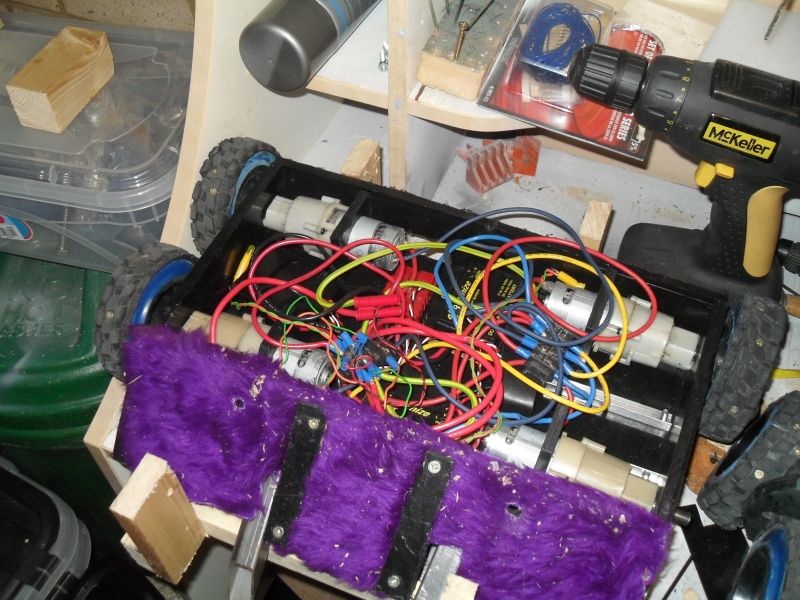
So my emergency Maidstone robot (An adorable Kitten) was pretty fun and seemed to get a few laughs despite my fear of Major Damages new flamethrower, but I need a proper robot. So (Since I never posted any) this was AAK after the Maidstone event feeling worse for wear.
And the absolute mess of wiring:
And I am replacing it with an Axe feather weight.
The plan is a Speed 900 powered Axe (Driven by a H-Bridge), 2 gimson 18V 36:1 GR-02's on 75-100mm wheels, 2 electronise speed controllers (Taking them out the old robot), 6S LiPo. All packaged in a 5mm steel shell with Polycarb top and lights... lots of nice lights.
Some initial Pictures:
The axe mechanism was provided by Maddox and is nice and light. The axe head is quite a nice bit of high carbon steel, the spiked side seems to breeze through HDPE without much effort. I plan to have it so I can turn the axe head around to have either the flat or pointed edge as my 'Attacking' swing.
The robot will have blue lights so I can see where it is in the arena, but for the audiences fun whenever I fire the axe it will flash to the red LED's.
Cheers,
Shakey
- FRA
- Forum
- Robots
- Events
- Media
- What's New?
All times are GMT. The time now is 16:19.





 Reply With Quote
Reply With Quote











Bookmarks