

A while back at a friends house I came across one of these old fashioned tonka toys - a chunky steel thing which surely wouldn't be allowed anywhere near a child these days.
Clearly I wasn't about to take one to a sandpit but it was the first time I'd seen rubber tracks at an almost-perfect scale for a featherweight. Here it is by my beetle for comparison.
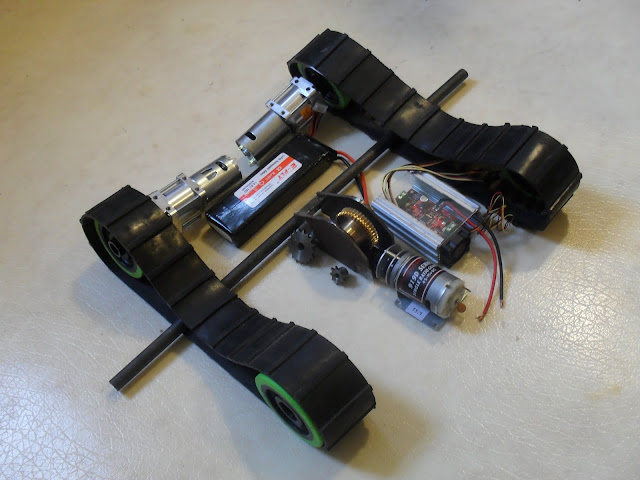
And so, after finding two of these monster-toys on eBay and spending silly amounts of money on various other components here's where I am:
The observant among you will notice it's essentially a larger version of my beetleweight. I actually started planning and compiling parts for this one long before fractal but the beetle was much easier (and cheaper) to build. I was at one point hoping to finish this machine by September but instead have decided to take it slowly but surely, as is usually the route to more successful designs.
Instead of the four powered axles on the beetle this will only have two, with two dead axles at the front. One of the most complex elements of this design is likely to be track tensioning, something that I really don't want to be rushed on - there will most probably be two additional suspension arms per side.
Here's a shot to give you an idea of the arm/weapon actuator. It's a combination of an MFA como drill motor and homemade gearbox (although the standard motor will likely be swapped out for another 540 sized one). The overall reduction is 831:1 (the three stages being 11:1 > 40:1 > 9:17). Hopefully it will be pretty damn hard to back-drive given the worm stage.
The drive gearboxes are the new-style 26:1 reduction banebots ones with 540 style motors fitted. The motors are 9.6v hobby-racing style motors to be run off a 14.8v battery. The wheel diameter over the track is approx 74mm (which compared to the body height of 38mm should give decent clearance). You'll notice the toothed drive-hub for transmitting power to the track, this took a lot of maths and patience to get right!
Here's a size-comparison with the beetle. It's pretty compact for a featherweight, and I've still yet to build to the new 13.8kg rules, thus I'm going for a mostly steel and hardox welded construction (inc. all hardox scoop). Having got the hang of welding this should be fun - when I've got the time and money to finish it all!
- FRA
- Forum
- Robots
- Events
- Media
- What's New?
All times are GMT. The time now is 10:34.







 Reply With Quote
Reply With Quote




Bookmarks