


They'll be fine if they have a stop to limit the angle it can turn.
- FRA
- Forum
- Robots
- Events
- Media
- What's New?
All times are GMT. The time now is 05:00.

They'll be fine if they have a stop to limit the angle it can turn.
Fixed. :P
The latest addition to my vapourbot arsenal, Murdertrain.
[attachment=0:27wbyg6k]Murdertrain.jpg[/attachment:27wbyg6k]
Name: Murdertrain
Weight: 100 kg
Shape: Box with a wedge
Colour: Green body, grey scoop and connecting rods with some blood on it, made to look sort of like a train (I know it's not those colours in the picture but meh)
Dimensions: 80cm * 63cm * 18cm (with scoop)
Drive: 2 * Perm PMG 132 motors running on 59.4 V with 5 * 18 cell A123 ANR26650M1 battery packs
Locomotion: 6 * 20 cm diameter 5 cm wide titanium hubbed wheels with rubber coating
Armour: 5mm Ti 6Al 4V on the body
Speed: 14 mph
Ground Clearance: 0 cm at the front under scoop, 1 cm elsewhere
Turning Circle: 0 cm
Weapon: 15 mm thick 45* hardox lifting scoop 63 cm wide powered by an S28-400 Magmotor on 26.4V geared at 80:1 to
provide a powerful lifter (pivot is in line with front wheel centres)
There is a titanium 'tongue' under the scoop to prevent the robot from tipping over forwards whilst lifting and the
titanium connecting rods also have some short spikes on them.
The Magmotor is powered by a seperate 8 cell A123 ANR26650M1 battery pack and it acts like a dustpan when inverted.
Srimech: Invertible but the scoop is less effective upside down
Notes: The connecting rods provide 6 wheel drive from only two wheels being directly driven by motors.
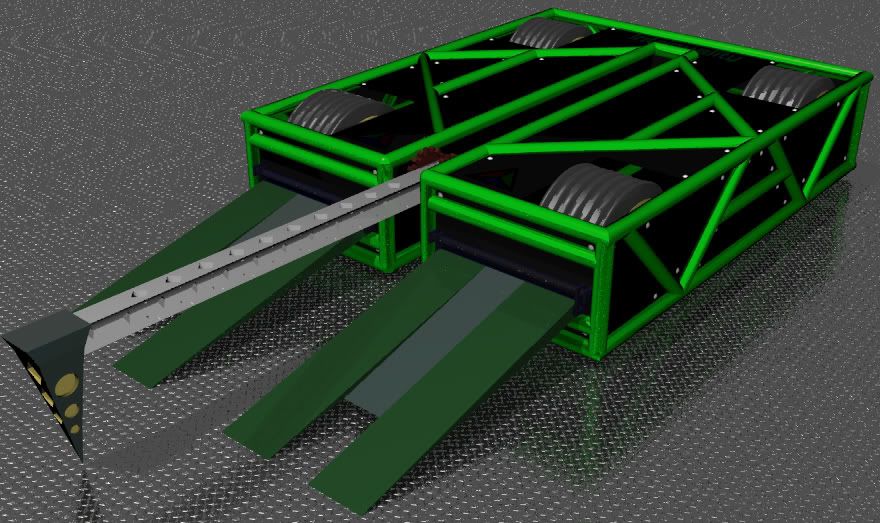
Finally, the stats for walkies. I hope that it'll work because pneumatics aren't my strong point and sorry for the lateness.
[attachment=0:zguehu9s]Walkies.png[/attachment:zguehu9s]
Name: Walkies
Weight: 200 kg
Shape: Look at the picture (if you can't see it then it's a Trapezoidal prism with a Hexagonal prism turret on top
Colour: Green, White and Orange turret with a grey base
Dimensions: 75cm * 75cm * 40cm (not including axe and fully sitting down)
Drive: 4 * S28-400 Magmotors running on 24 V with 40:1 worm gear reduction and 10 PN-3000-24 BattlePacks powering them
(used like servos
Locomotion: 4 * 60cm long, 5 cm wide slightly curved feet made from 5mm titanium and a textured rubber coating for grip
Armour: 7 mm hardox front, sides and bulkheads on the base with 5 mm titanium for everything else.
Speed: Very slow
Ground Clearance: Varies (5 cm when fully standing up, 0 cm when feet are fully in)
Turning Circle: 0 cm
Weapon: 70cm long hatchet style hardox axe with 2 * 3.5 mm thick arms and a 6 kg, 25 mm thick head. Runs at 300 psi with a
rack and pinion powered by two 3 kg CO2 bottles and a double acting 150 mm bore, 220 mm stroke ram.
The axe is mounted on a 70 cm diameter turret spun by a pair of S28-400 magmotors and has 6 ultrasonic sensors and
some clever programming to keep the axe aimed at the closest object (this can be manually overridden when it gets
confused)
The turret also has a small red laser pointer aimed at where the hammer should hit.
Srimech: The axe
Notes: A true walker that can sit, play dead and roll over
It's a shuffler though :POriginally Posted by daliad100
Each of the four feet is indepentently controlled by an S28-400 magmotor that is used as a servo with limited angle to walk in this fashion on each side http://incredibots2.com/?robotID=dal...31c04.54213413
Found this drive train simulator whilst looking for motor dimensions:
http://www.enigmaindustries.com/EDTSim.htm
Might be of use to people in designing vapours and even real robots as it can do battery life as well.
I used to have the paid version of that.
Hey Guys. It's me!, returning from a long absence (my computer broke) and should have a new vapour in a couple of days.
Case in point:
My new feather, Hardox armour.
 Posting Permissions
Posting Permissions

 Reply With Quote
Reply With Quote



Bookmarks