
looking good!
- FRA
- Forum
- Robots
- Events
- Media
- What's New?
All times are GMT. The time now is 18:59.

looking good!
Thanks, I'll thin the base and do a test run with it.
started some wiring, hope it holds.

Damn it.
well as a failsafe at least it failed safely lol
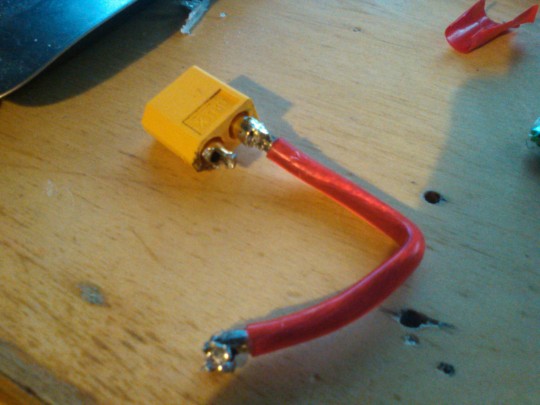
Could someone show me how they make it easy to insert their removable link into the robot or how they mount the connecter (that the link connects to) to the robot. Because the wire on my link keeps coming undone after a few trys to insert and remove it. it's a xt60 connector.
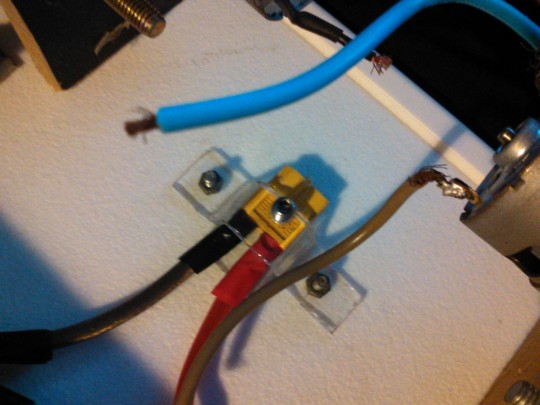
had a go at mounting the connector for the link. Kinda works could do with suggestions though.
On another note the wire on the link keeps on coming undone on the same side of the connector, how do people grip the link when they remove it? Pull on the wire? or grip the connector?
I think you're supposed to be able to pull on the wire. If it's coming undone, either find a better connector (like the red ones which require you to push the contact into the connector end) or check your solder connections. I suppose you could also try reinforcing it with some tape, but I'd only do that as a last resort.
If you pull off the wire from the connector, the soldering is "not good".
If you can pull the wire appart, it's too thin.
A good solder joint is as strong as the connector or the wire.
I see, guess I'll try a 4th go at soldering the connection.
 Posting Permissions
Posting Permissions

 Reply With Quote
Reply With Quote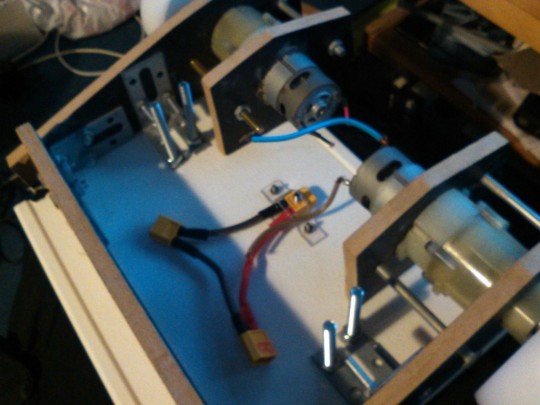

Bookmarks